

Datasheet
Updated: Friday, November 17th 2023
Robot Safety Module Datasheet
Contents

Overview
The Robot Safety Module is the interface between Vention’s MachineMotion 2 controller & Vention’s partner robots’ safety interfaces. The Robot Safety Module manages the safety fault events that happen on the machine to safely stop both the MachineMotion 2 controller and the robot. With the Robot Safety Module connected in Vention’s safety chain, a safety event from the robot will stop the MachineMotion 2 controller and a safety event from Vention’s safety chain will also stop the robot. The Robot Safety Module also serves as an Ethernet switch between Vention’s Pendant, MachineMotion 2 controller and the robot.
Features
- Configuration Free, Plug & Play
- Compatible with MachineMotion 2
- Daisy-chainable
- Compatible with multiple Cobot brands
- On-board status LED
- Internal 3 port Ethernet switch
Technical Specifications
General Specifications
| Part Number | CE-SA-009-0000 |
| Weight | 1 kg |
| Dimensions | 66 x 127 x 172 mm |
| Material |
|
| Operating Temperature | 0 to 40°C |
| Certifications | CE |
| Included in the Box |
|
Physical Interface

Electrical Specifications
| Nominal Input Voltage | 24 VDC |
| Input Voltage Range | 19.2 - 26.4 VDC |
| Operating Power Consumption | 4.8 W |
| FROM ROBOT Connector Input Type | Redundant 24V (4 contacts) |
| TO ROBOT Connector Output Type |
|
| Short Circuit Protection | Internal E-FUSE IC |
| Maximum Current Allowed | 2 A |
| Post-short Current | 250 mA |
| Release Delay at 24V | < 40 ms |
| Reset Total Delay | 7 seconds |
| Ethernet Switch | 3 ports 10/100MB |
Pinout
FROM ROBOT port
Connector: M12, female, 4-pin, A-Keyed
| Pin | Description |
|---|---|
| Pin 1 | Robot Safety Output 0V Contact 1 |
| Pin 2 | Robot Safety Output 24V Contact 1 |
| Pin 3 | Robot Safety Output 0V Contact 2 |
| Pin 4 | Robot Safety Output 24V Contact 2 |
TO ROBOT port
Connector: M12, male, 12-pin, A-Keyed
| Pin | Description |
|---|---|
| Pin 1 | NC |
| Pin 2 | NC |
| Pin 3 | Robot Safety Input Channel 1 Contact 1 |
| Pin 4 | Robot Safety Input Channel 1 Contact 2 |
| Pin 5 | Robot Safety Input Channel 2 Contact 1 |
| Pin 6 | Robot Safety Input Channel 2 Contact 2 |
| Pin 7 | Robot Input Reset Contact 1 |
| Pin 8 | Robot Input Reset Contact |
| Pin 9 | Robot Ethernet TX+ |
| Pin 10 | Robot Ethernet TX- |
| Pin 11 | Robot Ethernet RX+ |
| Pin 12 | Robot Ethernet RX- |
SAFETY IN port
Connector: M12, female, 12-pin, A-Keyed
| Pin | Description |
|---|---|
| Pin 1 | 24V |
| Pin 2 | 0V |
| Pin 3 | MachineMotion Safety Channel 1 Contact 1 |
| Pin 4 | MachineMotion Safety Channel 1 Contact 2 |
| Pin 5 | MachineMotion Safety Channel 2 Contact 1 |
| Pin 6 | MachineMotion Safety Channel 2 Contact 2 |
| Pin 7 | Input Reset Contact 1 |
| Pin 8 | Input Reset Contact 2 |
| Pin 9 | Pendant Ethernet TX+ |
| Pin 10 | Pendant Ethernet TX- |
| Pin 11 | Pendant Ethernet RX+ |
| Pin 12 | Pendant Ethernet RX- |
SAFETY OUT port
Connector: M12, male, 12-pin, A-Keyed
| Pin | Description |
|---|---|
| Pin 1 | 24V |
| Pin 2 | 0V |
| Pin 3 | MachineMotion Safety Channel 1 Contact 1 |
| Pin 4 | MachineMotion Safety Channel 1 Contact 2 |
| Pin 5 | MachineMotion Safety Channel 2 Contact 1 |
| Pin 6 | MachineMotion Safety Channel 2 Contact 1 |
| Pin 7 | Output Reset Contact 1 |
| Pin 8 | Output Reset Contact 2 |
| Pin 9 | MachineMotion Ethernet TX+ |
| Pin 10 | MachineMotion Ethernet TX- |
| Pin 11 | MachineMotion Ethernet RX+ |
| Pin 12 | MachineMotion Ethernet RX- |
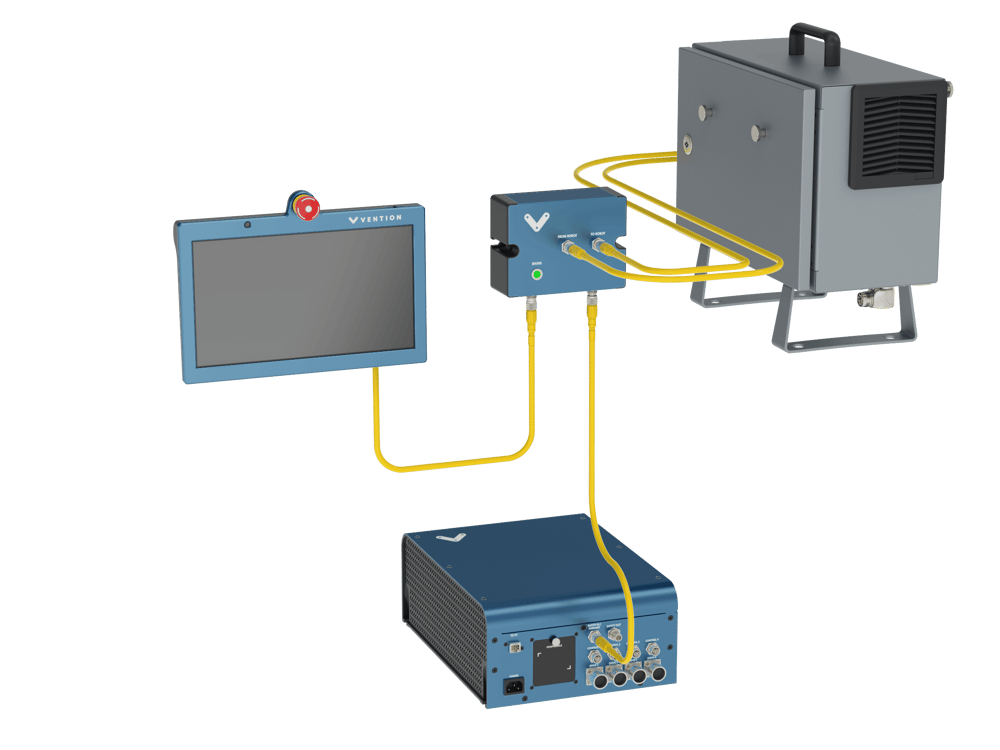
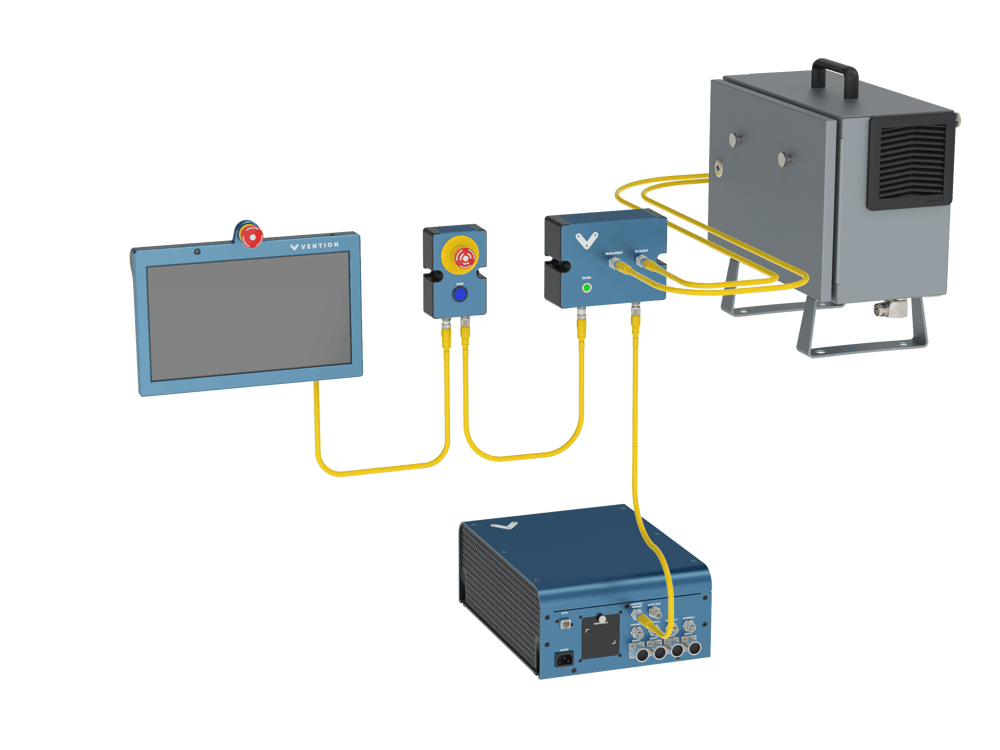
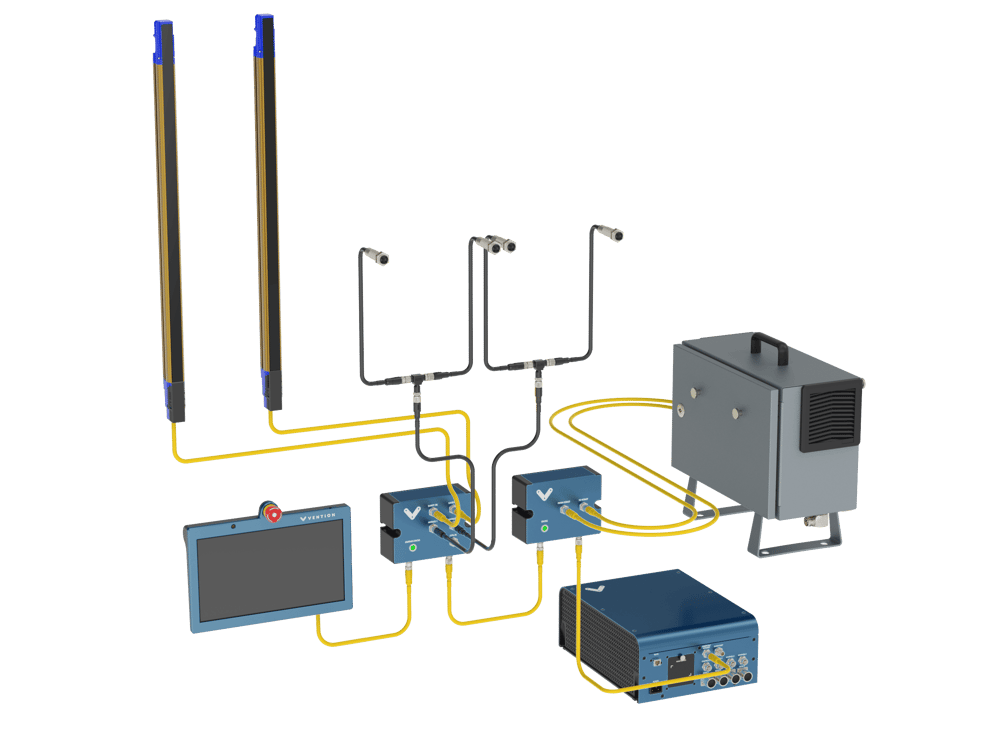
Applications
The Robot Safety Module can link the safety interfaces of Cobots with MachineMotion 2. The following diagrams show the typical use-cases of the module:
Use Case Examples
Safety Data
The Robot Safety Module is used to propagate safety signals between :
- The SAFETY IN port to the TO ROBOT port
- The FROM ROBOT port the SAFETY OUT port; and
- The SAFETY IN port to the SAFETY OUT port.
For each of these functions performed by the Robot Safety Module, safety data can be found in the following table:
| Function | PL | Cat. | MTTFd | DCavg |
|---|---|---|---|---|
| From Robot to Safety OUT | e | 3 | 128.3 | 98.72% |
| From Safety IN to To Robot | e | 3 | 65.8 | 98.90% |
| From Safety IN to Safety OUT | e | 3 | 126.1 | 98.81% |
The above information have been calculated based on the following operation conditions:
| Data | Value | Unit |
|---|---|---|
| dop | 365 | days/years |
| hop | 24 | hours/days |
| tcycle | 8640 | s/cycle |