Physical AI für die Fertigungsindustrie
GRIIP™ (Generalized Robotic Industrial Intelligence Pipeline) ist eine End-to-End Physical AI-Pipeline, die Roboter befähigt, wahrzunehmen, zu denken und in unstrukturierten Aufgaben und unvorhersehbaren Fertigungsumgebungen zu handeln.
Jenseits traditioneller Automatisierung
Die nächste Grenze der Fertigung erschließen
Unstrukturierte Fertigungsaufgaben haben sich der Automatisierung widersetzt, weil bestehende Lösungen die Komplexität der realen Welt nicht bewältigen können. GRIIP macht das Unmögliche möglich, indem es fundamentale Herausforderungen löst, die die Grenzen der Roboterautomatisierung definiert haben.
End-to-End-Intelligenz
Traditionelle Roboter versagen bei Teilevariation und Unordnung. GRIIP bewältigt von der Wahrnehmung bis zur kollisionsfreien Bewegung und passt sich ohne individuelle Programmierung an Komplexität an.
Kein Training erforderlich
Konventionelle Systeme benötigen Wochen für Datenerfassung und Einlernen. GRIIP funktioniert sofort ohne Trainingsdaten. CAD-Dateien hochladen und in Minuten mit dem Greifen beginnen.
Skalierbare KI-Plattform
Jede Anwendung erfordert traditionell individuelle Entwicklung. GRIIPs generalisierte Pipeline wird über Aufgaben hinweg eingesetzt für schnellere Projekte, höheren ROI und Designwiederverwendung.
Warum GRIIP
Entwickelt für Fertigung im großen Maßstab
Entwickelt für die Anforderungen der Fertigungsrealität, liefert Anpassungsfähigkeit ohne Einbußen bei Geschwindigkeit oder Zuverlässigkeit. GRIIP bewältigt Variation bei gleichzeitiger Einhaltung der Leistungsstandards, die die Produktion verlangt.
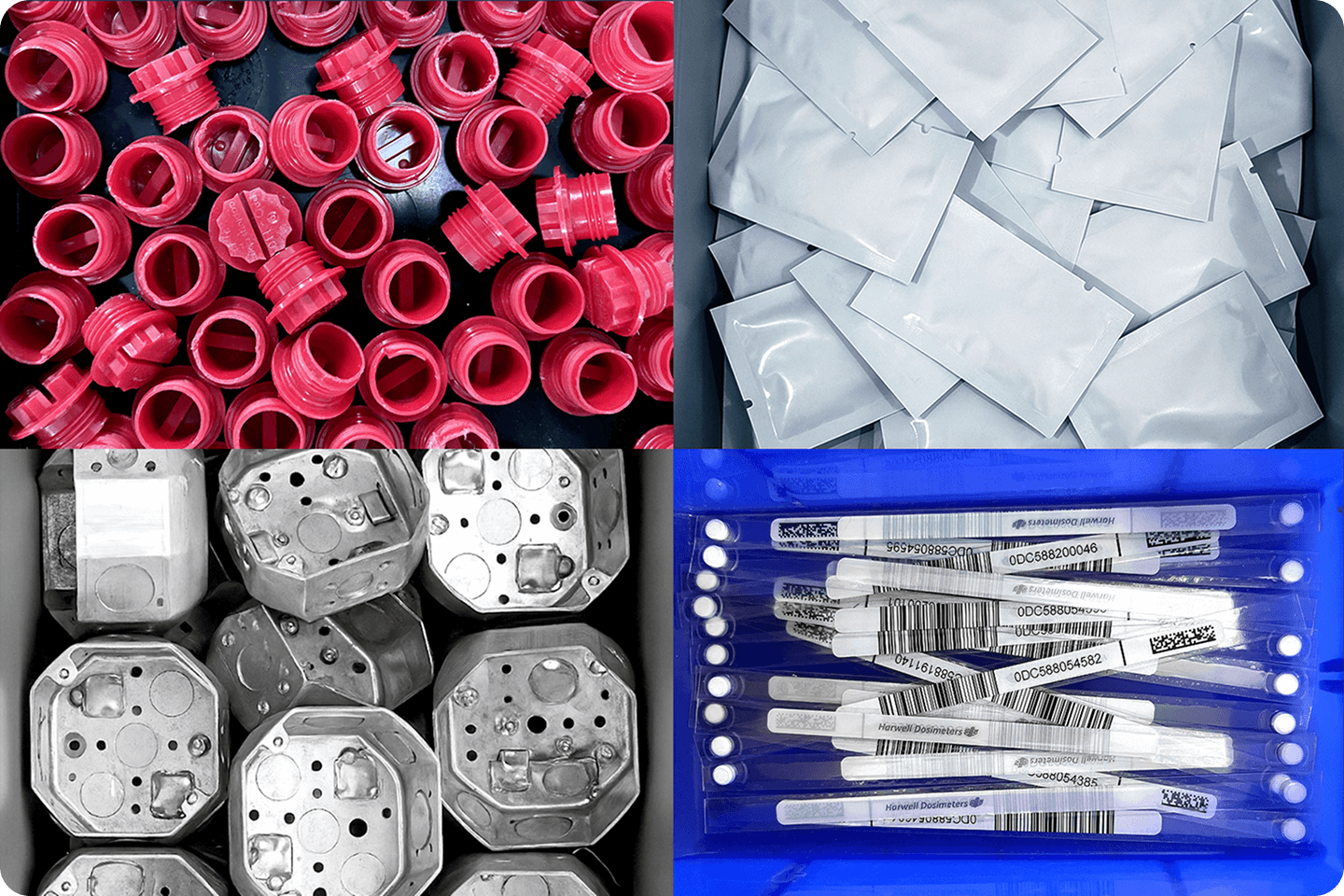
Für Vielfalt gebaut
Funktioniert mit jedem Teil
Passt sich an vielfältige Teilegeometrien, Materialien, Texturen und Transparenz ohne individuelles Training an. Bewältigt gemischte SKUs und neue Teile ohne teilespezifische Programmierung.
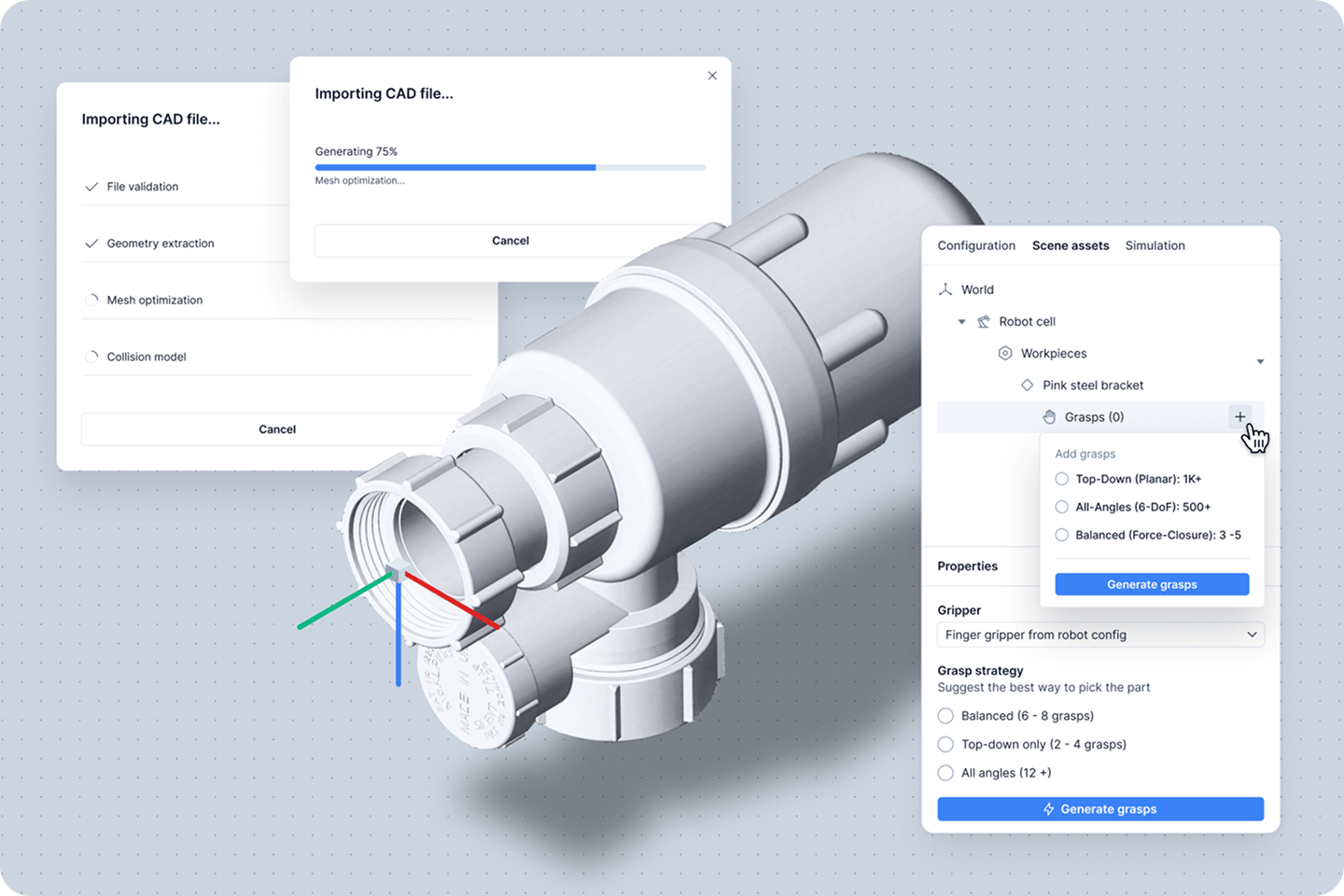
Geschwindigkeit zur Produktion
Von CAD zum Greifen in Minuten
Funktioniert sofort ohne Trainingsdaten oder Datensätze. Automatisiertes Setup eliminiert langwierige Inbetriebnahme. Roboterzellen in Stunden einsetzen und Teile in Minuten hinzufügen.
Widerstandsfähigkeit gegen Veränderungen
Für die Fertigungsrealität gebaut
Behält zuverlässige Leistung trotz Änderungen bei Beleuchtung, Arbeitsplatzlayouts und Umgebungsfaktoren. Bewältigt Unordnung, Verdeckungen und dynamische Bedingungen autonom.
Produktionsbereite Zuverlässigkeit
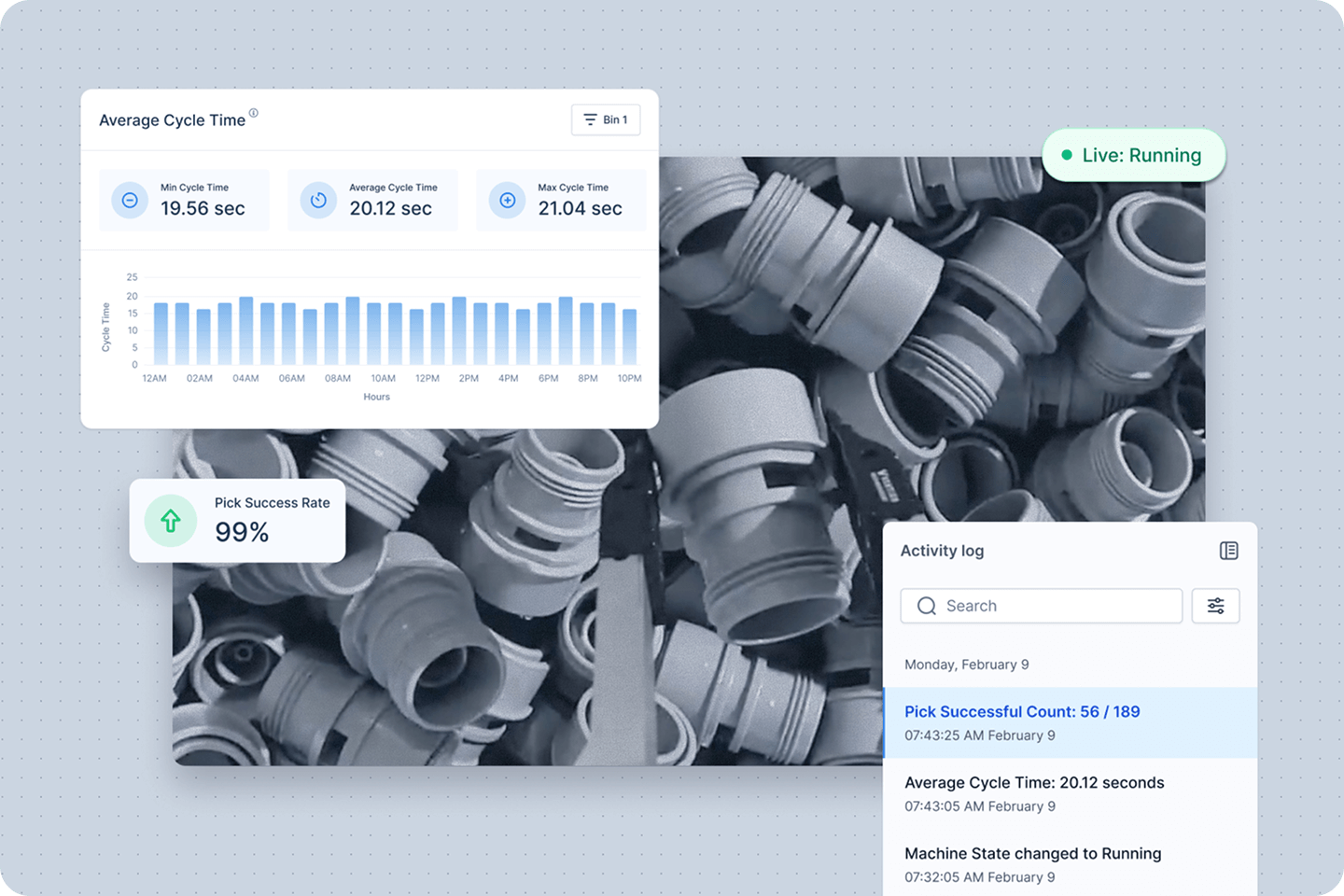
Konstante Leistung im großen Maßstab
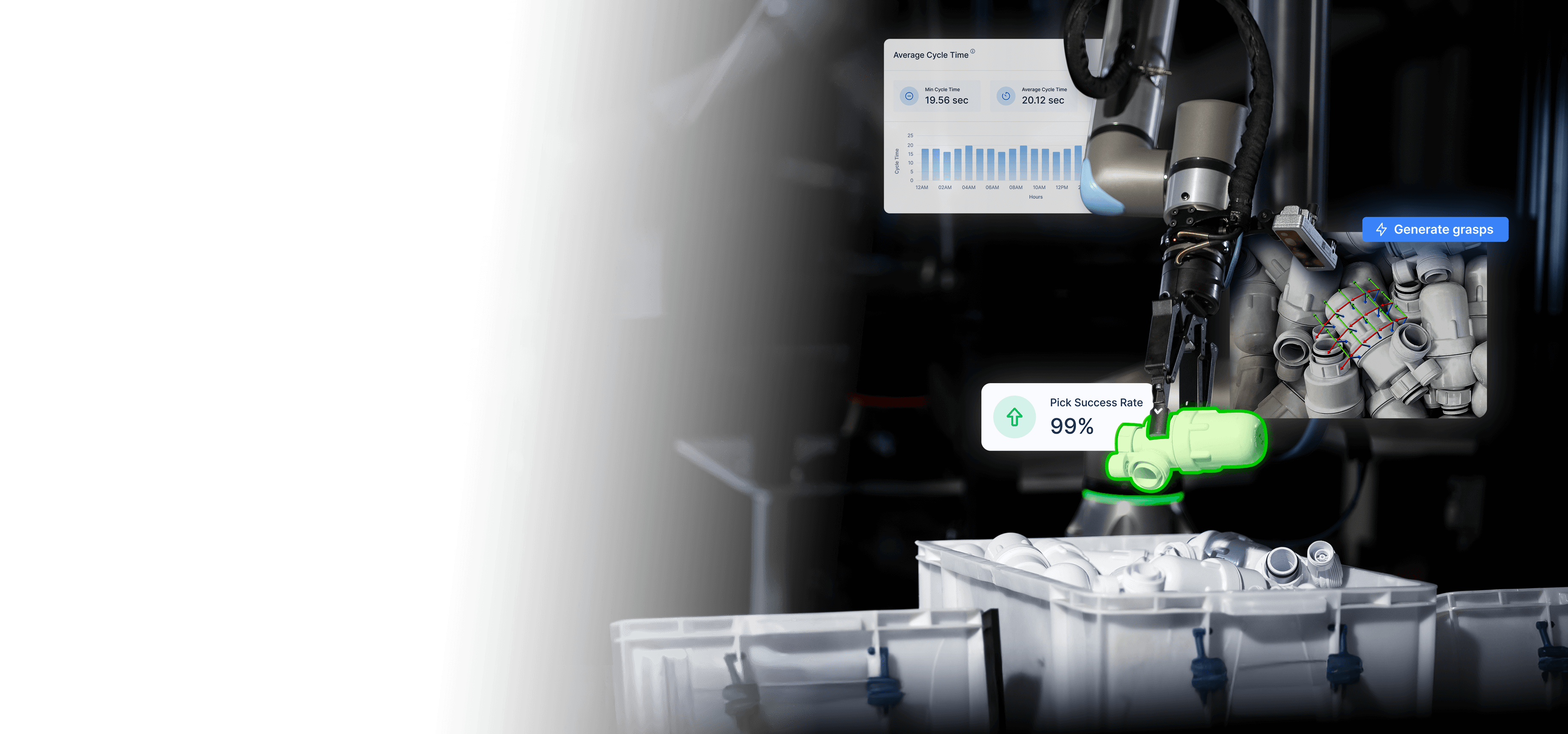
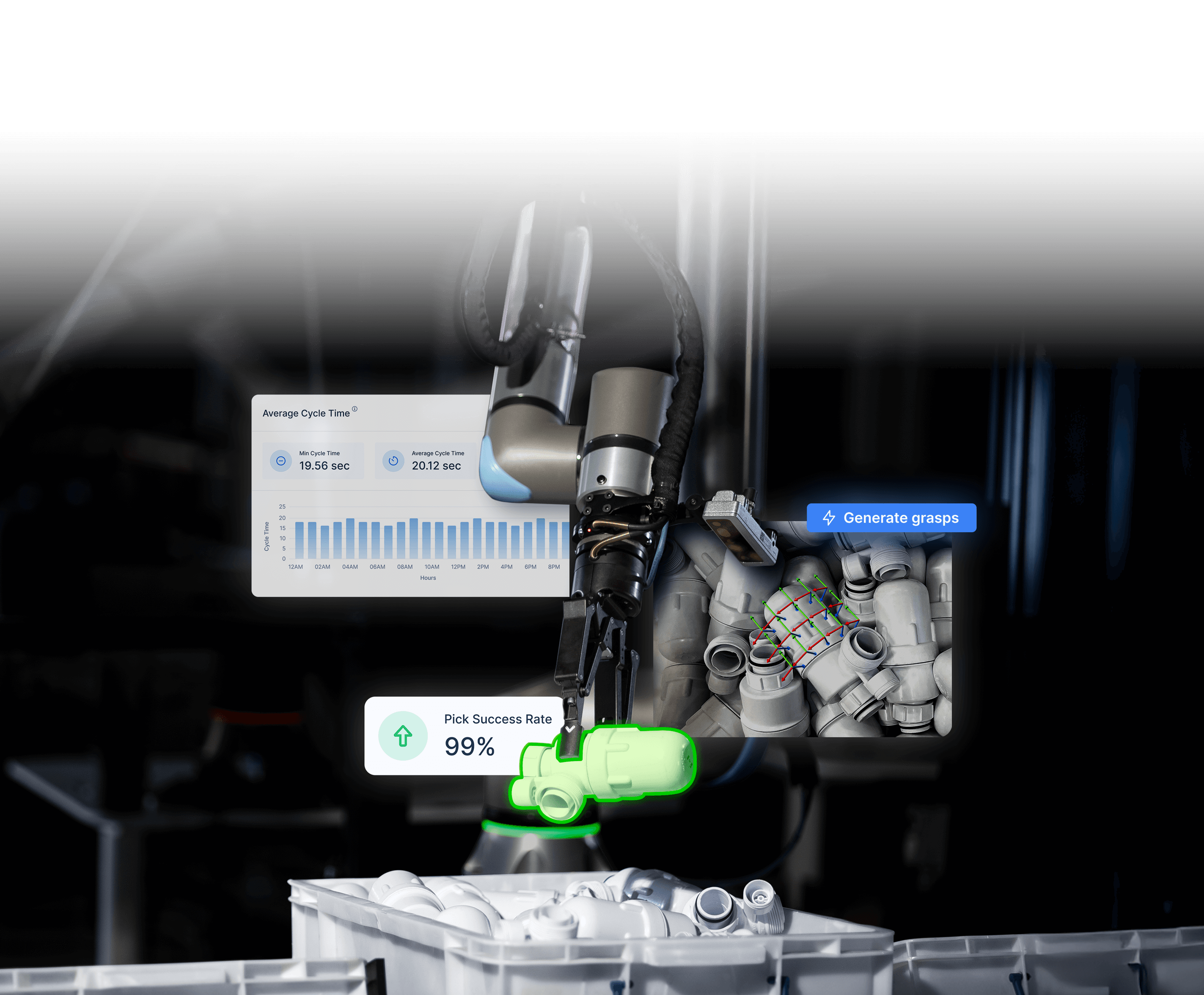
Hält 99% Greif-Erfolgsraten und vorhersagbare Taktzeiten aufrecht. Liefert Stabilität zur Zielerreichung bei gleichzeitiger Anpassung an Variation, die traditionelle Automatisierung scheitern lässt.
Die Pipeline aufschlüsseln
Generalisierte physische KI für die Fertigung
Eine einheitliche Pipeline von der Wahrnehmung zur Bewegung, die für kontinuierliche Evolution entwickelt wurde. Die Architektur nutzt stets modernste Foundation-Modelle und verbessert die Leistung ohne Hardware-Upgrades oder manuelle Eingriffe.
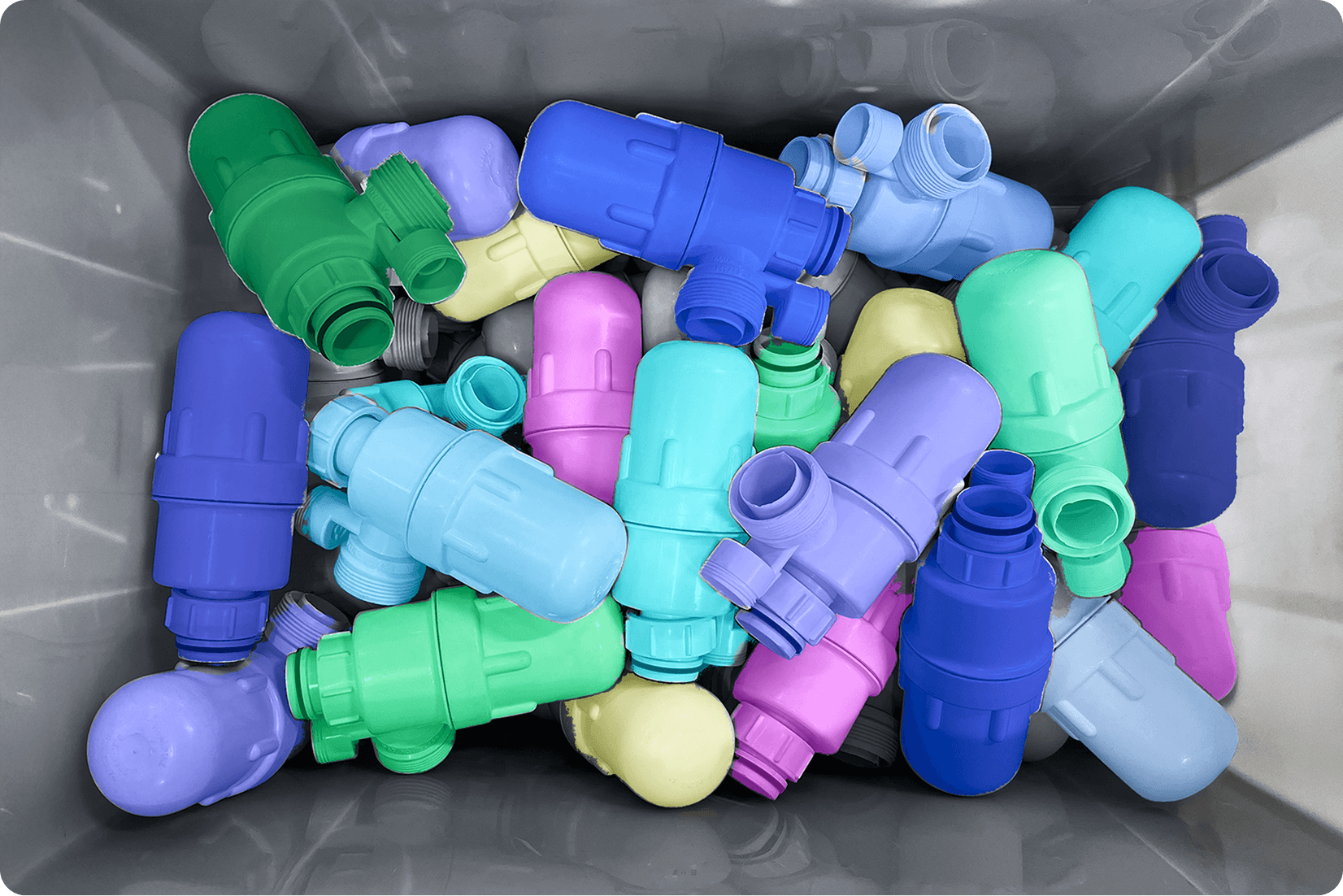
Wahrnehmung & Segmentierung
Wandelt visuelle Eingaben in strukturiertes Verständnis um, indem Objekte im Arbeitsbereich erkannt und segmentiert werden.
Segmentiert Objekte in ungeordneten, unstrukturierten Umgebungen
Passt sich an verschiedene Teilegeometrien und Materialeigenschaften an
Behält Leistung über wechselnde Lichtbedingungen bei
Wahrnehmung & Segmentierung
Wandelt visuelle Eingaben in strukturiertes Verständnis um, indem Objekte im Arbeitsbereich erkannt und segmentiert werden.
Segmentiert Objekte in ungeordneten, unstrukturierten Umgebungen
Passt sich an verschiedene Teilegeometrien und Materialeigenschaften an
Behält Leistung über wechselnde Lichtbedingungen bei
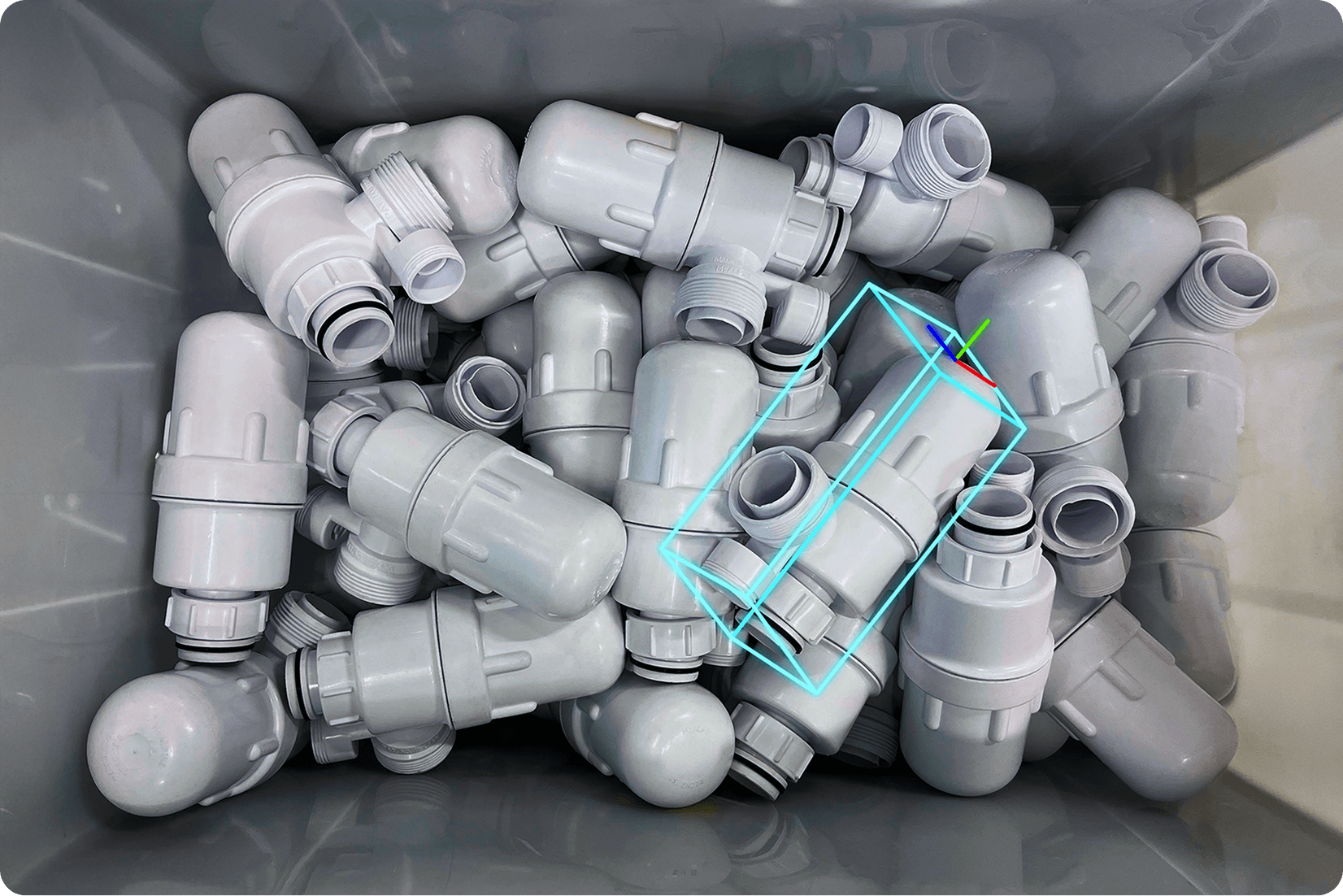
Pose-Schätzung
Schätzt Objektausrichtung und -position mit Submillimeter-Genauigkeit während des gesamten Manipulationszyklus, vom Vorgriff bis in der Hand.
Bietet 6DOF-Pose-Schätzung für Greifpunktberechnung
Verfolgt Objektpose während der Manipulation für stabiles Handling
Passt sich in Echtzeit an Objektbewegung und -verschiebungen an
Pose-Schätzung
Schätzt Objektausrichtung und -position mit Submillimeter-Genauigkeit während des gesamten Manipulationszyklus, vom Vorgriff bis in der Hand.
Bietet 6DOF-Pose-Schätzung für Greifpunktberechnung
Verfolgt Objektpose während der Manipulation für stabiles Handling
Passt sich in Echtzeit an Objektbewegung und -verschiebungen an

Greif-Intelligenz
Analysiert die Szene, um Hunderte von Greifpunkten für optimale Objektmanipulation zu identifizieren, zu bewerten und zu ranken.
Bewertet Hunderte von Greifkandidaten in Sekunden
Bewältigt zufällige Orientierungen, gemischte Teile und Variation
Maximiert Greif-Erfolgsraten mit minimalem manuellem Tuning
Greif-Intelligenz
Analysiert die Szene, um Hunderte von Greifpunkten für optimale Objektmanipulation zu identifizieren, zu bewerten und zu ranken.
Bewertet Hunderte von Greifkandidaten in Sekunden
Bewältigt zufällige Orientierungen, gemischte Teile und Variation
Maximiert Greif-Erfolgsraten mit minimalem manuellem Tuning

Szenen-Digitalisierung & Kalibrierung
Erstellt und pflegt eine digitale Darstellung der Roboterumgebung für genaues räumliches Reasoning.
Digitalisiert automatisch Arbeitsbereichsgeometrie und -grenzen
Kalibriert Transformationen für zuverlässige Bewegungsausführung
Ermöglicht schnellere Bereitstellung mit reduzierter Inbetriebnahme
Szenen-Digitalisierung & Kalibrierung
Erstellt und pflegt eine digitale Darstellung der Roboterumgebung für genaues räumliches Reasoning.
Digitalisiert automatisch Arbeitsbereichsgeometrie und -grenzen
Kalibriert Transformationen für zuverlässige Bewegungsausführung
Ermöglicht schnellere Bereitstellung mit reduzierter Inbetriebnahme
Kollisionsfreie Pfadplanung
Plant und führt Roboterbewegung aus, indem einzigartige Trajektorien für jeden Griff basierend auf Echtzeitbedingungen generiert werden.
Berechnet kollisionsfreie Pfade durch kinematische Filterung
Passt jeden Bewegungsplan an die tatsächliche Greifkonfiguration an
Berechnet Trajektorien neu, wenn sich Umgebungen und Layouts ändern
Kollisionsfreie Pfadplanung
Plant und führt Roboterbewegung aus, indem einzigartige Trajektorien für jeden Griff basierend auf Echtzeitbedingungen generiert werden.
Berechnet kollisionsfreie Pfade durch kinematische Filterung
Passt jeden Bewegungsplan an die tatsächliche Greifkonfiguration an
Berechnet Trajektorien neu, wenn sich Umgebungen und Layouts ändern
Von GRIIP angetriebene Anwendungen
Eine KI-Pipeline. Endlose Fertigungsanwendungsfälle.
Wo traditionelle Robotik maßgeschneiderte Entwicklung pro Aufgabe erfordert, setzt GRIIP dieselbe KI-Basis über diverse Fertigungsabläufe ein. Ein System, mehrere Anwendungen, keine aufgabenspezifische Programmierung.
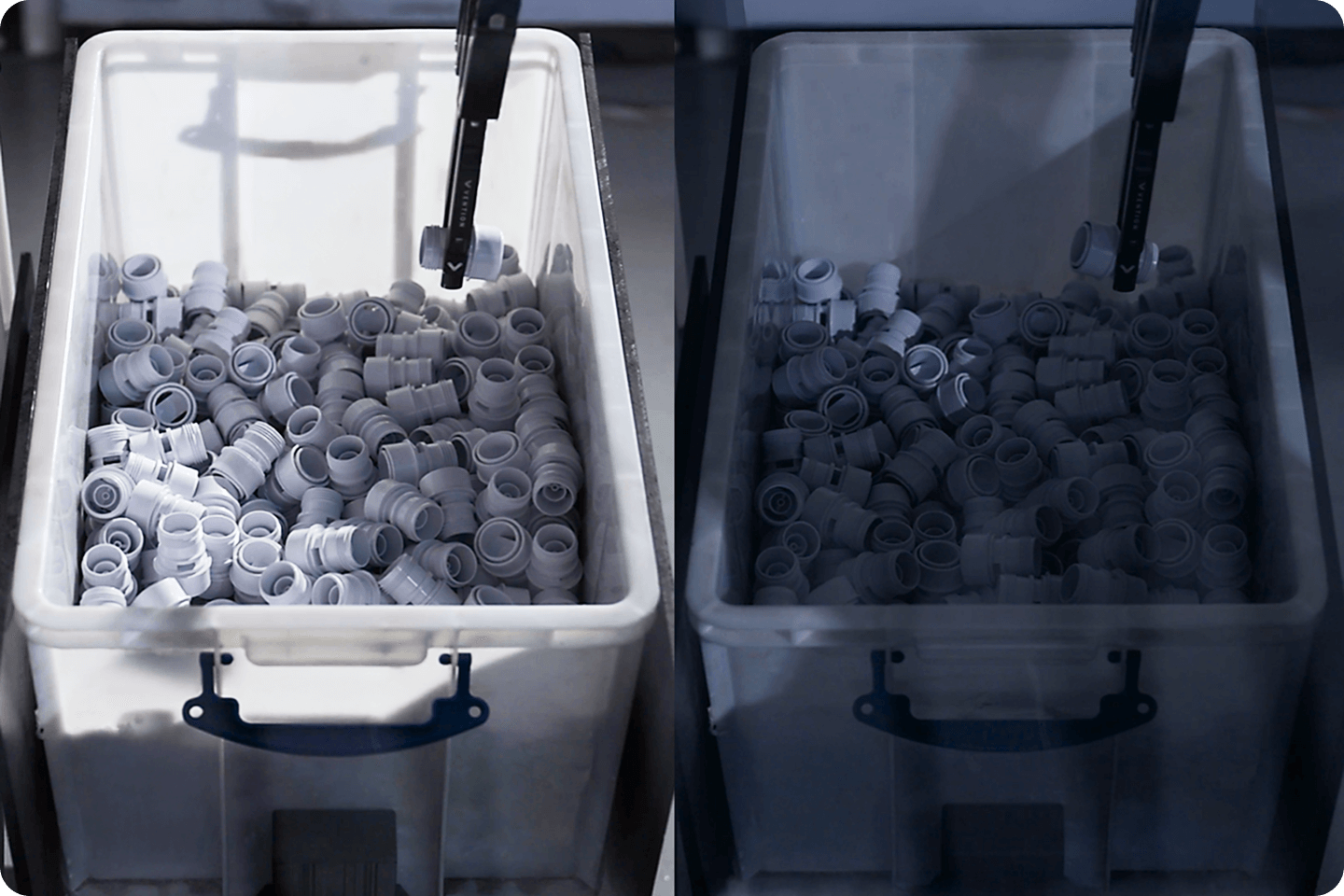
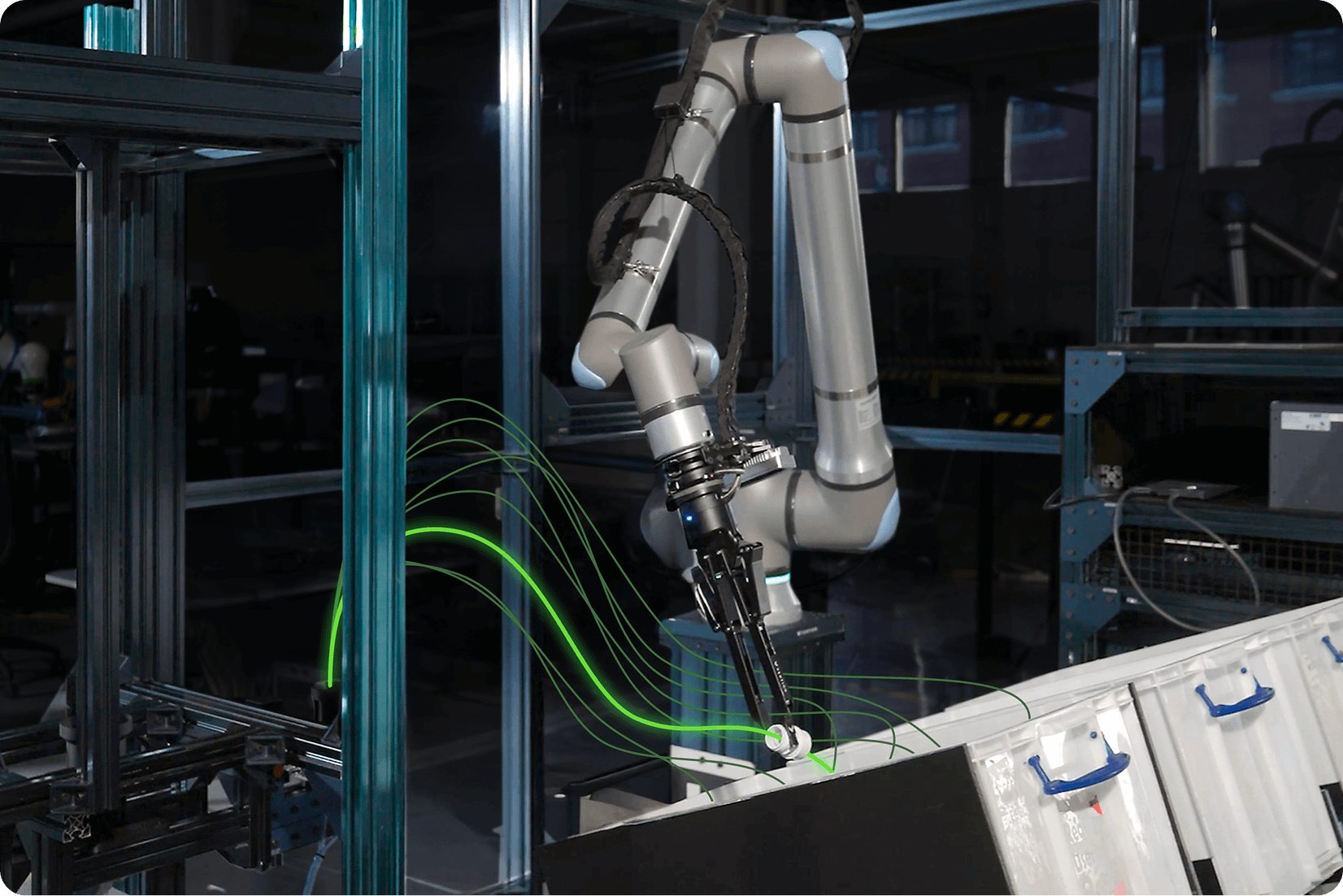
Behälterkommissionierung
Greift zufällig orientierte Teile aus tiefen Behältern mit hoher Zuverlässigkeit. Bewältigt gemischte SKUs, verschiedene Geometrien und ungeordnete Szenen ohne Programmierung.
Förderband Pick & Place
Verfolgt und greift bewegliche Teile von Förderbändern mit Präzision. Bewältigt variable Positionierung und wechselnde Geschwindigkeiten ohne Neukalibrierung.
Kitting
Stellt Kits zusammen, indem mehrere Teiletypen in Trays platziert werden. Passt sich automatisch an verschiedene Komponenten und Konfigurationen an.
Depalettierung
Entlädt Teile von Paletten mit variierenden Stapelmustern und Orientierungen. Bewältigt gemischte Ladungen und passt sich automatisch an verschiedene Palettenkonfigurationen an.
Schleifen
Führt präzise Oberflächenbearbeitungsaufgaben an komplexen Geometrien aus. Passt Werkzeugwege an tatsächliche Teilepositionen und Oberflächenvariationen für konstante Qualität an.
Maschinenbeschickung
Belädt und entlädt Teile für CNC-Maschinen, Pressen und andere Ausrüstung. Passt sich an Teilevariation und wechselnde Orientierungen bei konstanten Taktzeiten an.
Jetzt starten
GRIIP für Ihre Anwendung evaluieren
Verbinden Sie sich mit unseren Fertigungs-KI-Experten, um zu erkunden, wie GRIIP Ihre unstrukturierten Aufgaben automatisieren kann. Wir evaluieren Ihre spezifischen Teile und Prozesse, um die Technologie in Aktion zu demonstrieren.