MachineMotion Four-Drive Datasheet
Introduction
MachineMotion v2 datasheet contains detailed technical specifications, such as: functional pinout, input & outputs, specifications, input / output capabilities by model, electronics & embedded software specifications and unit dimensions.
Overview
MachineMotion v2 is a plug and play industrial controller that contains the necessary infrastructure to execute motion and control applications through a library of modular components. Equipment powered by MachineMotion v2 can be programmed through MachineLogic – Vention’s code-free visual sequence editor – or through Vention’s Python SDK.
MachineMotion 1 datasheet can be found in the ‘Documentation for Previous Product Versions’ at the bottom of this page
Features
- Control up to four 250 W high performance step-servos with accurate and automatic position adjustments. This allows the actuator to always reach the user-specified position, thanks to a built-in encoder that enables the motors to operate in closed control loops.
- Step-servo junction box with simple cabling, where the brake, home and end-stop sensors can be directly wired to the motor.
- Status light on servo motors and controller for quick diagnostics
- Loaded with code-free software including:
- Control Center
- MachineLogic
- Python
- Open source development tools including:
- Cloud 9 IDE
- Javascript
- Operator mode
- Manual joggers
- The MachineMotion v2 controller is certified to Canadian, US & European standards.
- IP30 rated enclosure for industrial applications, with active cooling and replaceable filters
- Connect digital I/O and analog modules to control I/O devices
- Supports multiple external communication protocols including MQTT & EtherNet/IP
- Single continuous flex cable to power an actuator, sensors and power-off brake
- Plug and play with all Vention actuators
- Native support for Universal Robots with URcap
- Plug and play safety system with physical and software reset
- Directly connect peripherals locally or remotely using the teach pendant, keyboard, mouse, and monitor
Applications
- Automated equipment
- Cartesian robot
- Functional and reliability test benches
- Conveyor system
- Inspection cells
Supported robot interfaces
- Fanuc
- Universal robots
- ABB
- Doosan
Electrical Specifications
| Certifications | |
| North America |
|
| Europe |
|
| Power Port | |
| Name | POWER |
| Rated Voltage | 85 to 264 VAC |
| Rated Current | 9A @ 120 VAC |
| Typical Current | 4.5A @ 120 VAC |
| Typical Power | 1200 W |
| Standby Current | 0.7 A (@ power factor 0.55) |
| Standby Power | 84 W |
| Emergency Mode Current | 0.4 A (@ power factor 0.3) |
| Emergency Mode Power | 48 W |
| Connector | IEC C14 |
| Power Cord | 3.00m, NEMA 5-15P to IEC 320-C13, SJT |
| Drive Ports | |
| Name(s) | DRIVE 1, DRIVE 2, DRIVE 3, DRIVE 4 |
| Motor Type | Servo-Stepper |
| Output Peak Voltage | 50 V |
| Maximum Output Current | 10 A |
| Maximum Output Power | 350 W |
| Phase Current Peak | 0 - 10 A |
| Phase Current Adjustment (Internal) | Software controlled |
| Control Interface (Internal) | CAN/(Step-Dir-Enable) Signals |
| Motor Drivers Certification | CE |
| Connector | M23 Amphenol Sine |
| Pin 1 | 24 V |
| Pin 2 | 0 V |
| Pin 3 | motor phase A+ |
| Pin 4 | motor phase A- |
| Pin 5 | motor phase B+ |
| Pin 6 | motor phase B- |
| Pin 7 | Encoder A+ |
| Pin 8 | Encoder A- |
| Pin 9 | Encoder B+ |
| Pin 10 | Encoder B- |
| Pin 11 | Encoder Index+ |
| Pin 12 | Encoder Index- |
| Pin 13 | NC |
| Pin 14 | NC |
| Pin 15 | Home/End Limit Switch S1 |
| Pin 16 | Home/End Limit Switch S2 |
| Pin 17 | 24V Safety Switched |
| Control (1,2,3,4) Ports | |
| Name(s) | Control 1, Control 2, Control 3, Control 4 |
| Connectivity Type | Communication |
| Connectivity Physical Layer | CAN/RS485 |
| Connector | M12, female, 8-pin, A-Keyed |
| Pin 1 | 24 V (70W max) |
| Pin 2 | 0 V |
| Pin 3 | RS485 A |
| Pin 4 | RS485 B |
| Pin 5 | CAN H |
| Pin 6 | CAN L |
| Pin 7 | NC |
| Pin 8 | 24V Safety Switched |
| To PC Port | |
| Name(s) | To PC |
| Connectivity Type | Ethernet |
| Connectivity Physical Layer | IEEE 802.3, Ethernet |
| Connector | RJ45 |
| LAN Ports | |
| Name(s) | LAN 1, LAN 2 |
| Connectivity Type | Ethernet |
| Connectivity Physical Layer | IEEE 802.3, Ethernet |
| Connector | RJ45 |
| USB Ports | |
| Name(s) | USB 1, USB 2 |
| Connectivity Type | USB |
| Connectivity Physical Layer | USB 2.0 |
| Connector | USB-A 2.0 |
| HDMI Ports | |
| Name(s) | HDMI |
| Connectivity Type | HDMI |
| Connectivity Physical Layer | HDMI |
| Connector | HDMI Type A |
| Note: drives inside the MachineMotion 2 operate at 48VDC and are designed to power 2-phase stepper motors. They can deliver up to 10A of current per phase. The maximum power consumption for all the drives together is 1000W. Safety In / Pendant Port |
|
| Name(s) | SAFETY IN / PENDANT |
| Type | Redundant Dry Contacts + Reset |
| Connectivity Physical Layer | IEEE 802.3, Ethernet |
| Connector | M12, female, 12-pin, A-Keyed |
| Pin 1 | 24 V (70W max) |
| Pin 2 | 0 V |
| Pin 3 | E-Stop IN Channel 1 Contact 1 |
| Pin 4 | E-Stop IN Channel 1 Contact 2 |
| Pin 5 | E-Stop IN Channel 2 Contact 1 |
| Pin 6 | E-Stop IN Channel 2 Contact 2 |
| Pin 7 | Reset Contact 1 |
| Pin 8 | Reset Contact 2 |
| Pin 9 | Ethernet TX+ |
| Pin 10 | Ethernet TX- |
| Pin 11 | Ethernet RX+ |
| Pin 12 | Ethernet RX- |
| Safety Out Port | |
| Name(s) | SAFETY OUT |
| Type | Redundant Dry Contacts + Reset |
| Connector | M12, female, 12-pin, A-Keyed |
| Pin 1 | NC |
| Pin 2 | 0 V |
| Pin 3 | E-Stop OUT Channel 1 Contact 1 |
| Pin 4 | E-Stop OUT Channel 1 Contact 2 |
| Pin 5 | E-Stop OUT Channel 2 Contact 1 |
| Pin 6 | E-Stop OUT Channel 2 Contact 2 |
| Pin 7 | Reset Contact 1 |
| Pin 8 | Reset Contact 2 |
| Pin 9 | NC |
| Pin 10 | NC |
| Pin 11 | NC |
| Pin 12 | NC |
| Ethernet Port | |
| Name(s) | ETHERNET |
| Connectivity Type | Standard Ethernet |
| Physical Layer | IEEE 802.3, Ethernet |
| Connector | RJ45, 8p8c |
| Pin 1 | NC |
| Pin 2 | TX+ |
| Pin 3 | TX- |
| Pin 4 | RX+ |
| Pin 5 | RX- |
| Pin 6 | NC |
| Pin 7 | NC |
| Pin 8 | NC |
| Default Ethernet or 192.168.7.2 Port | |
| Name | DEFAULT ETHERNET or 192.168.7.2 |
| Status | Unused |
Embedded & Computing Specifications
| Single Board Computer | |
| Processor | TI AM5729 |
| OS | Debian 10 |
| Memory | 32GB SD-micro |
| Certification | CE |
| Motion Controller | |
| Processor | Natotec CL4 |
| Interface | CAN |
| Protocol | G-code |
| Fieldbus Compatible Modules | |
| Digital IO Module | CE-MD-001-0001 |
| Analog IO Module | CE-MD-003-0000 *available soon |
| Push-Button Module | CE-MD-004-0000 |
Safety Specifications
| Safety PLC | |
| Manufacturer | ReeR |
| Model Number | M1 |
| Safety Data - Values per EN ISO 13849-1 | |
| Category | 3 |
| Performance Level | PLe |
| MTTFd | 64 years |
| DCavg | 97.3 % |
| PFHD | 8.84E-08 h<>-1 |
| Safety Data - Values per IEC/EN 61508 | |
| SIL | 2 (IEC/EN 61508) |
| HFT (hardware failure tolerance) | 1 |
| DCavg | 97.3% |
| SFF | 99.70% |
| PFHD | 1.45E-08 h<>-1 |
| Operation conditions | |
| dop | 365 days/year |
| hop | 24 hours/day |
| Tcycle | 8640 s/cycle |
Vention ControlCenter Software
MachineMotion comes with pre-loaded control and machine operations software – all of which is accessible through the MachineMotion pendant or via computer with a USB or Ethernet connection.
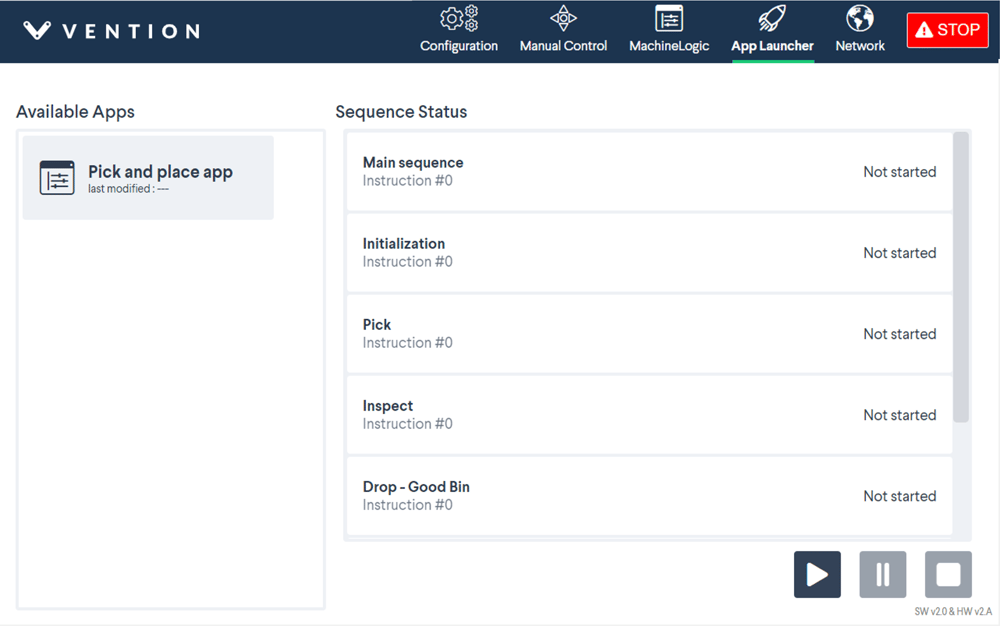
Application Launcher
- Launch MachineLogic Applications
- Launch Python Applications
- Configure programs in auto-launch mode (executes automatically after power-ON)
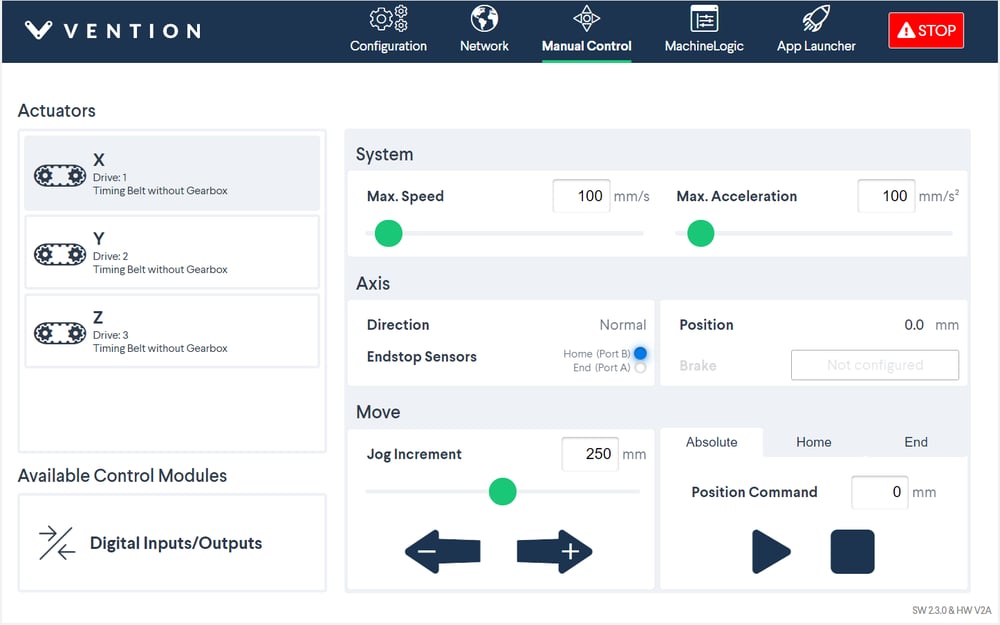
Manual Control
- Send motion commands to actuators
- Configure speed, acceleration and direction
- Monitor the state of end-of-travel sensors and connected control devices
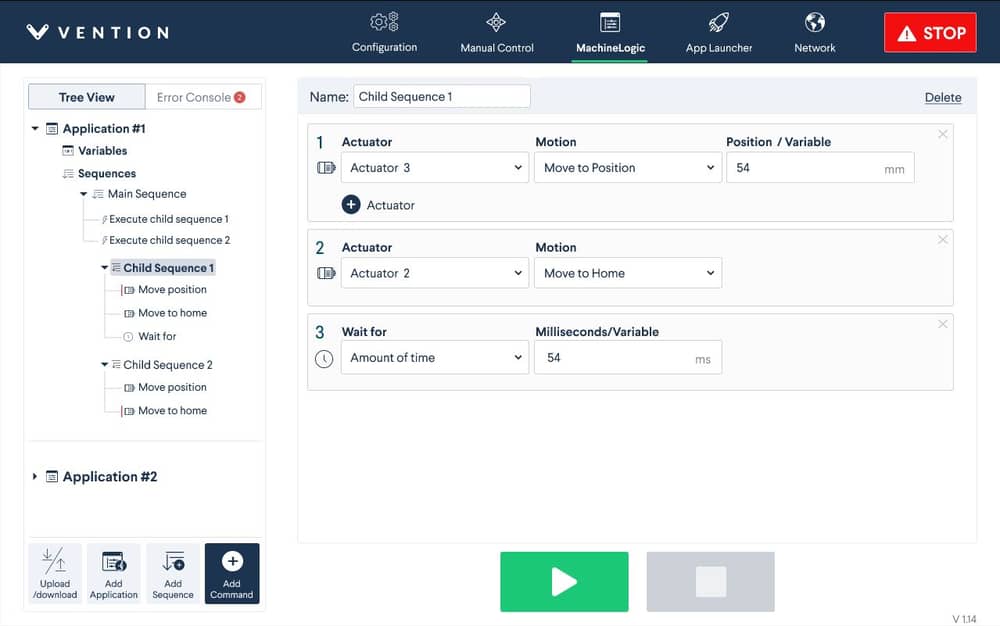
MachineLogic
- Create automation programs in a simple graphical interface
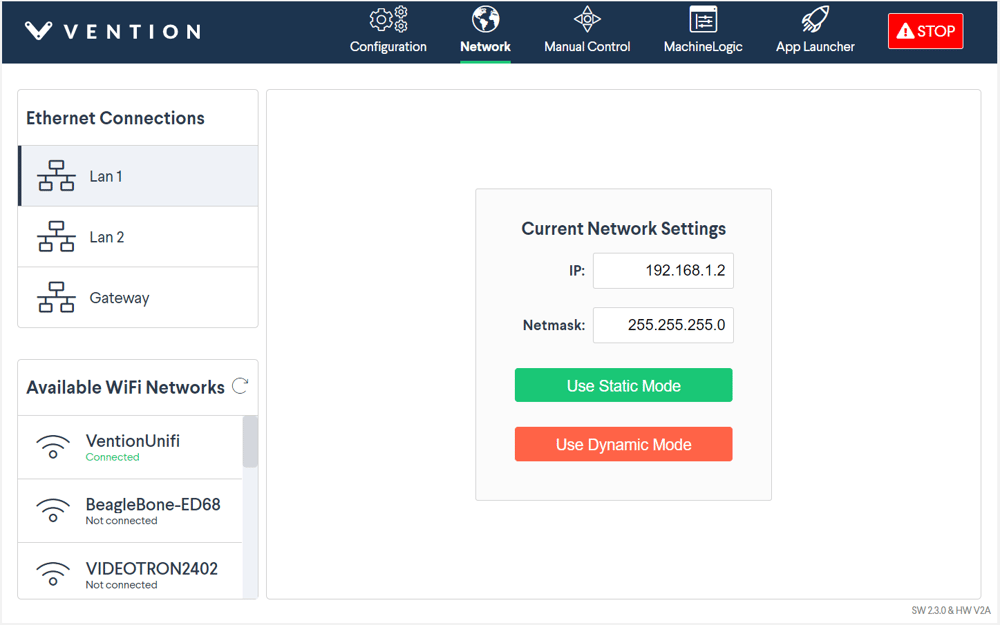
Network Configuration
- Configure the Ethernet ports and WiFi settings (only if the MachineMotion controller is connected to a MachineMotion pendant)
Software & Communication Protocol Specifications
| Available Control API |
| Python |
| Communication Protocol for Ethernet Adapter |
| web-socket |
| Communication Protocol for Fieldbus |
| MQTT |
| Security |
| MachineCloud connection is encrypted (TLS 1.2 & TLS 1.3, A-rated ciphers, RSA 2048-bit keypairs on server and client) |
Physical Unit

Functional Pinout


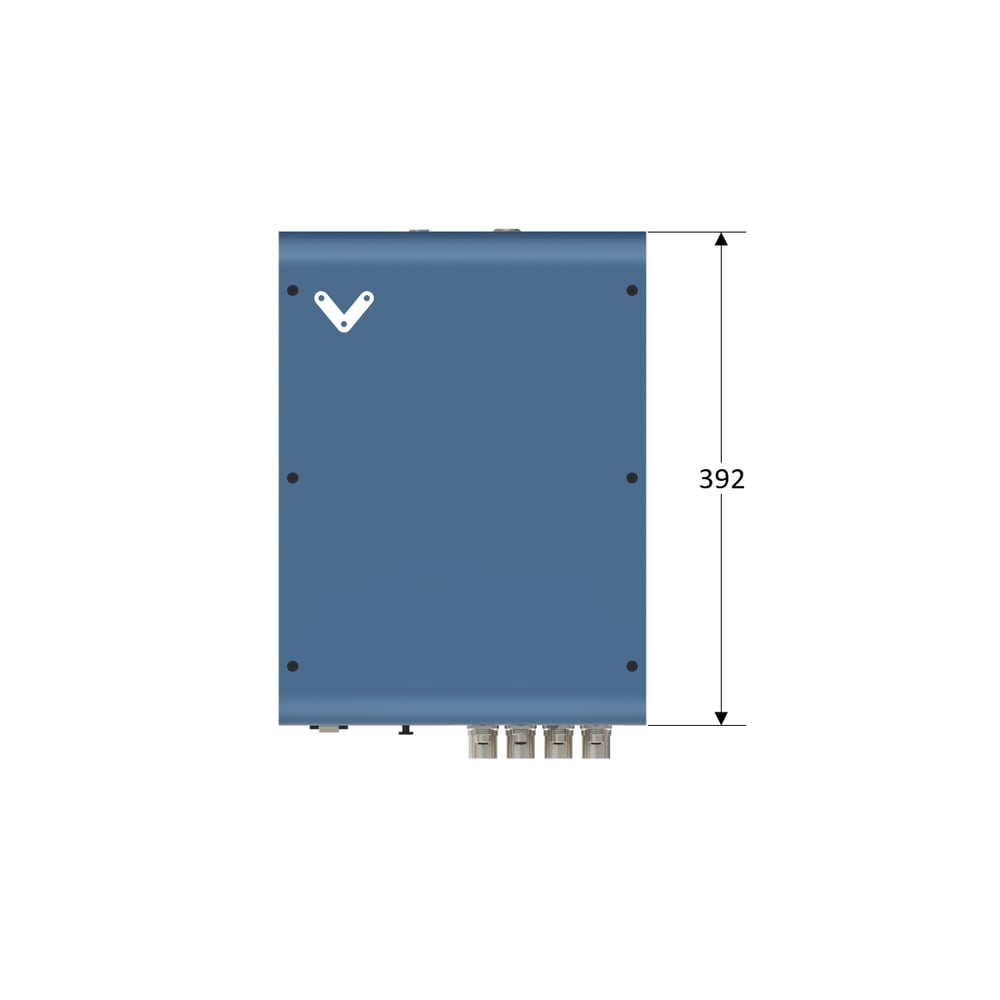
Unit Dimensions

Compatible Hardware
Plug and Play Automation Components
| MachineMotionTM Pendant CE-TP-004-0001 
|
M18 Inductive Proximity Sensor CE-SN-004-0001 
|
| Digital I/O Module CE-MD-001-0001 
|
Power-Off Brake MO-PT-002-0001 
|
| NEMA34 Servo Motors MO-SM-01X-0000 
|
Emergency Stop and Reset Module CE-SA-007-0000 
|