The Physical AI gold rush is here, with new models, prototypes, and humanoid demonstrations appearing almost weekly. Market forecasts also reflect this shift with some projections expecting the Physical AI market to reach trillions of dollars by the 2030s. For automation leaders planning brownfield and greenfield deployments today, these projections offer limited guidance for investment strategies that demand 1-2 year payback periods. The question then is “Is Physical AI ready for my factory floor?”
There is no single answer, because Physical AI is not a monolithic category. It spans different hardware architectures, perception systems, motion planning solutions, and learning models. Some systems are deterministic and modular. Others attempt holistic learning through large embodied models. However, when evaluating Physical AI through a lens of manufacturing task type, production-readiness, and technical maturity, clear patterns begin to emerge.
The following Physical AI brief distills those patterns to help automation leaders separate near-term value from longer-horizon experimentation when planning Physical AI pilots.
The Two Approaches to Physical AI
Most Physical AI deployments in production today fall into two distinct architectural approaches: AI pipelines and end-to-end learning-based models. The key distinction lies in how control is achieved. AI pipeline systems engineer behavior through explicit, modular stages, while end-to-end models attempt to learn behavior holistically from physical data, trading predictability for adaptability.
In practice, both types of Physical AI solutions excel at specific tasks, but capabilities learned in one domain, such as random deep bin picking, may not readily transfer to tasks that require greater dexterity such as folding laundry, and vice versa. This is why an apples-to-oranges comparison of the technical capabilities is not enough to determine their real world potential. A better way to identify the right approach for complex tasks on the factory floor is to categorize both systems through a lens of task type and their current production readiness.

AI Pipelines: Closest to Production Readiness
The advancement in LLMs in recent years has brought focus on Moravec’s Paradox. To put it simply, AI systems can excel in high-level reasoning tasks, but need much higher compute capacity to do simple tasks in the physical world. Gemini DeepThink can now solve 18 unsolved research problems and GPT-4 can pass the Uniform Bar Exam, but a robot struggles to turn a sock inside out. In manufacturing, this distinction matters more than ever as labor shortages persist, but production targets remain accelerated. In order for Physical AI solutions to be valuable for manufacturers, they need to deliver industry-grade cycle times and pick rates.
AI pipelines clear those hurdles by breaking down the task into discrete, optimized modules to perceive, plan and act. Each component can be tuned independently to meet the exact demands of production environments, thus increasing reliability. Additionally, the modular architecture also allows implementing a ‘best of breed’ approach where a superior model for one step in the process can replace the existing previous generation. With the rapid evolution of foundational models, this modularity can enable greater innovation, and prevent solutions from over-reliance on a fixed foundational tech stack.
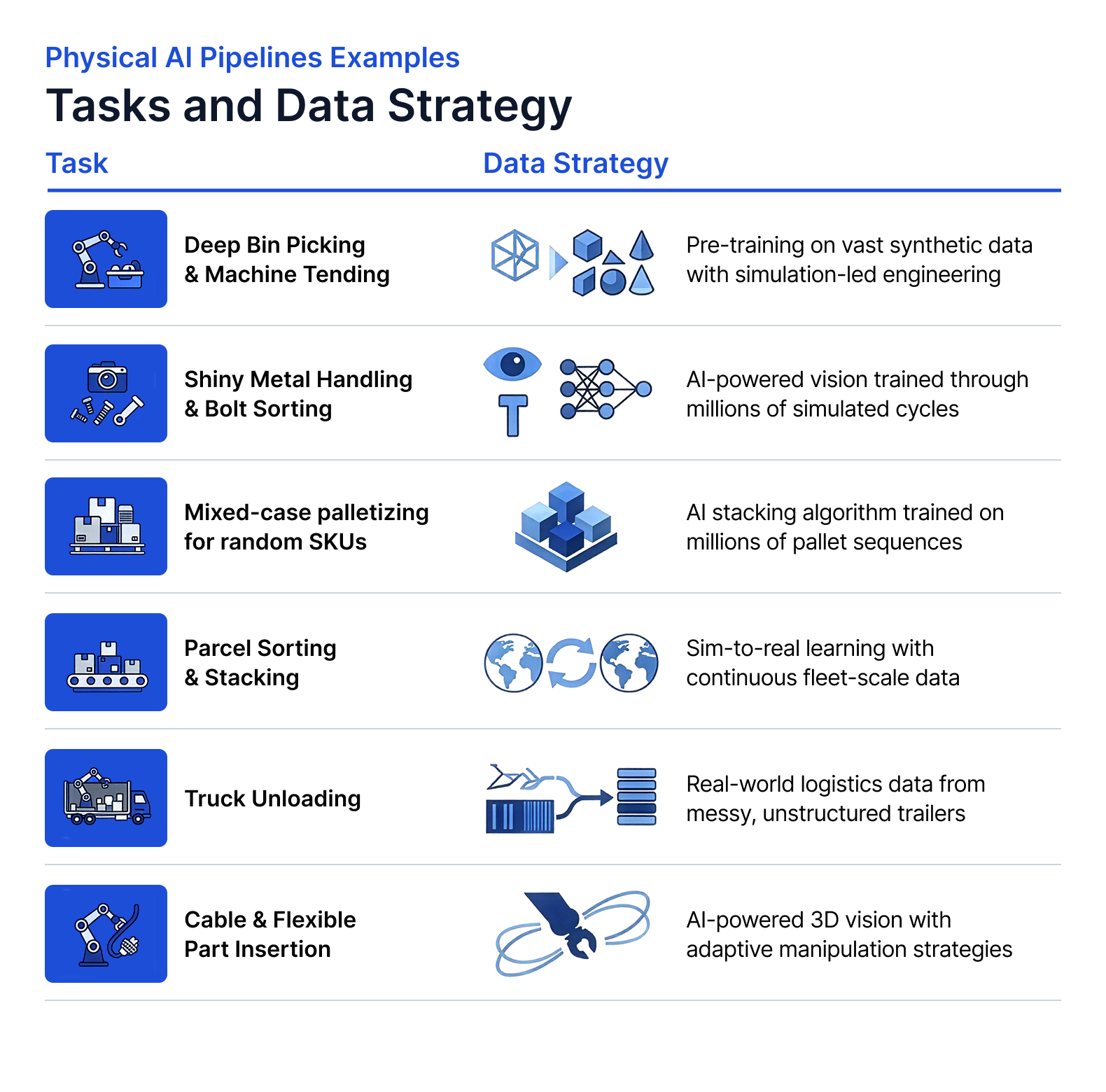
Our analysis points to three types of tasks where pipelines are especially strong.
The first is high-speed, high-volume picking and sorting. This is possible because the AI vision modules can be optimized to run in microseconds, decoupled from the motion planning layer beneath it. The grasps needed can be hardcoded for efficiency. Unsurprisingly, this application type is nearest to enterprise-grade metrics like 2,000 picks per hour for bolt sorting, 1,200 picks per hour for mixed parcel sorting at 99.5% accuracy, and 100,000 units picked per month per robot in apparel logistics.
The second is precision assembly in semi-structured industrial environments. Consider tasks like placing electronic clips in car interior panels, precision screw fastening, and glue dispensing. Usually, these require a skilled worker to reduce waste and rework. These tasks were once considered beyond the scope of traditional automation, but pipelines thrive here since vision and planning stages can be calibrated using a CAD-to-pick transition.
The third is perception under challenging environmental conditions. For example, a task such as picking up reflective surfaces under changing light can now be done autonomously for 24/7 lights-out production. Or consider the task of picking objects from unstructured bins. Changing light conditions, objects stacked against each other, and irregular shapes make it difficult and unviable to automate. AI pipelines are changing that.
Vention’s Generalized Robotic Industrial Intelligence Pipeline (GRIIP), for example, makes it easy to deploy a bin picking solution in minutes, with no need for custom coding.

*AI pipeline-based bin picking under varying light conditions.
End-to-End Models: High Potential, But Largely Experimental
Backflipping humanoid demos, while sensational, invoke skepticism about the industrial readiness of holistic learning models. The current cycle times of many of the showcased solutions are far from comparable with human operators, reinforcing the notion that these models aren’t quite ready for the shop floor. However, it would be a mistake to dismiss these attempts altogether as they have tremendous potential for long-term applications. For example, if the model learns the concept of folding rather than a hard-coded fold sequence, it can theoretically adapt to different fabric types, wrinkle patterns, or starting configurations without being reprogrammed. Another use case can be deploying a humanoid in new environments, without any need for pre-training as the robot contextualizes the data in real time.
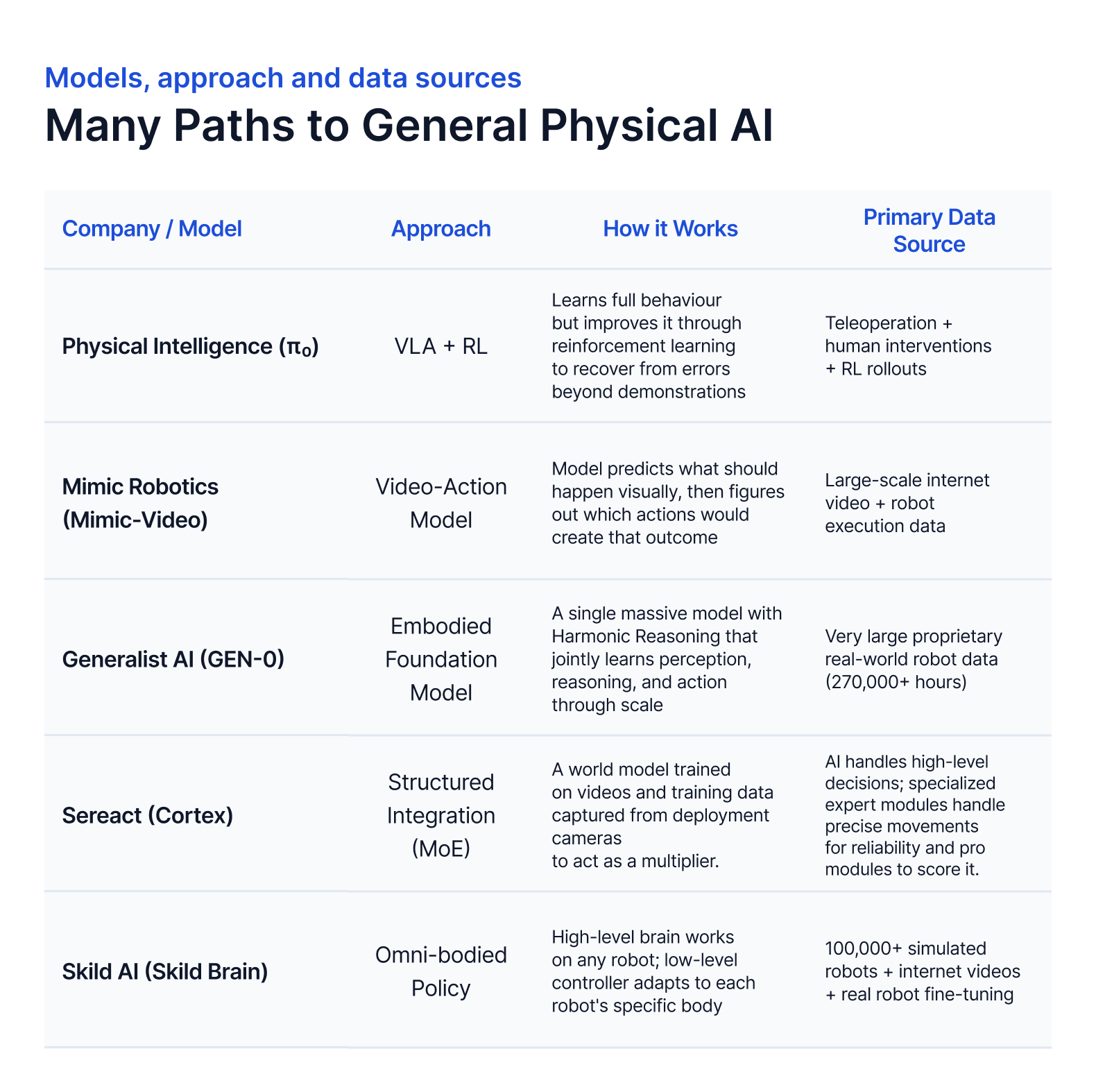
Ultimately the effectiveness of end-to-end models is dependent on how they acquire data, and how they reinforce learning in real-time. Currently there are multiple approaches to solve this, with Vision-Language-Action (VLA) models leading the fray. However, other approaches with unique data strategies are also evolving rapidly. For example, the Gen-0 model from Generalist AI uses large robot data to create an AI hivemind for its robots. Despite these advances, the biggest challenge in training these systems remains the data bottleneck. Collecting real world action data can be slow and expensive considering the support infrastructure needed. Models that depend on human teleoperation for this data are constricted by the human effort needed to repeat the action sequences. Lastly capturing the ‘human touch’ data is essential for true dexterity but currently there isn’t a standard process to achieve this.
The long-term industrial case for holistic systems is strongest for tasks that are challenging to automate using traditional approaches.
Bimanual tasks that require both speed and precision are a good example. Figure AI’s F.02 humanoid deployed at BMW helped build over 30,000 cars. Its movement through the real-world environment, adaptive grasping and precision were key elements made possible by Figure AI’s Helix model. The lessons learned are equally important as the robot was retired after a runtime of over 1,250 hours, highlighting the importance of hardware robustness.
Adaptive packing and kitting are another area where unified systems have a stronger use case, but haven’t yet achieved commercial viability. In Generalist AI’s cardboard box folding demo, for instance, the system takes longer than 2 minutes per box, highlighting the difficulty of the task. However, as the model improves, it could generalize the task and scale up for different types of boxes rapidly.
Then there are tasks that depend on coordinated movements. Mimic Robotics’ hand-to-hand bag transfer, or demos like making coffee, depend on force control, tactile feedback, and dozens of small adjustments. These represent process intelligence rather than scripted motions, and they are usually where traditional automation runs out of road.
When it comes to deployment in production, most end-to-end systems are not ready to run unattended around the clock. However, they address bottlenecks that pipeline architectures struggle with, including high-variation kitting, reverse logistics, and complex contract manufacturing workflows, which is exactly where the next gains in factory automation will occur.
The Future of Physical AI
Physical AI has the potential to rewrite the economics of the industry. As both Physical AI approaches evolve, deployments in manufacturing will depend on their capability to deliver repeatable throughput, faster ROI, and scalability. Today, AI Pipelines meet these requirements better with scalability, predictable cycle times, and easy upgrade paths due to their modular nature. However, as End-to-End models get more sophisticated, they could offer greater dexterity with faster ramp-up, making them a compelling choice.
Another possibility could be the rise of a third alternative, a hybrid of AI Pipeline and End-to-End approaches that would leverage the best from both. Some pipelines such as GRIIP are already closing the gap between performance and generalization since they’re trained on general foundational models. In the real world a hybrid of both approaches looks like a relay race where both models are on the same team. For example, in tasks like random bin picking, learning-based models could take on the high-entropy moments such as approach to the bin and identifying grasp. Once the part is secured, deterministic pipelines would reclaim control, delivering the predictable motion, safety validation, and cycle-time guarantees required on the factory floor. Together, they would form a system that is both adaptable and production-ready, rather than forcing manufacturers to choose between experimentation and reliability.
For automation leaders soon the real challenge with Physical AI wouldn’t be deciding which model to choose, but pairing it with platforms that make it economically viable for enterprise-wide deployment.
***
Want to know more about how both approaches Physical AI models work? Read our post explaining the differences between AI Pipelines and End-to-End models.
