
In early 2024, a video of Tesla’s Optimus robot folding a shirt went viral. Skeptics were quick to point out that the robot wasn’t technically autonomous and far from competitive on cycle time. Fast forward to today, we have fully autonomous demos folding laundry or sorting objects. So why aren’t they on every shop floor? The short answer is performance.
From a manufacturing standpoint, generalized robot intelligence has untapped potential, as it offers a higher dexterity ceiling, and skill acquisition. However, on the performance-driven factory floor, this adaptability may not be enough. Imagine a robot arm that ‘thinks’ and makes precise movements, only to miss objects on the conveyor due to lag. Conversely, a hard-coded cobot arm can ensure industrial-grade performance for narrow use cases, but may not be a viable option for unstructured tasks with changing environmental conditions.
In the last couple of years, attempts to solve the performance and dexterity problem have coalesced into two distinct camps for applied Physical AI solutions. On one side, we have AI Pipelines, which treat robotics as a geometry problem. On the other side, we have End-to-End Models, which treat robotics as a learning problem. To understand where the industry is going, we have to look under the hood at how these two “brains” function.
AI Pipelines: The Decentralized Intelligence Approach
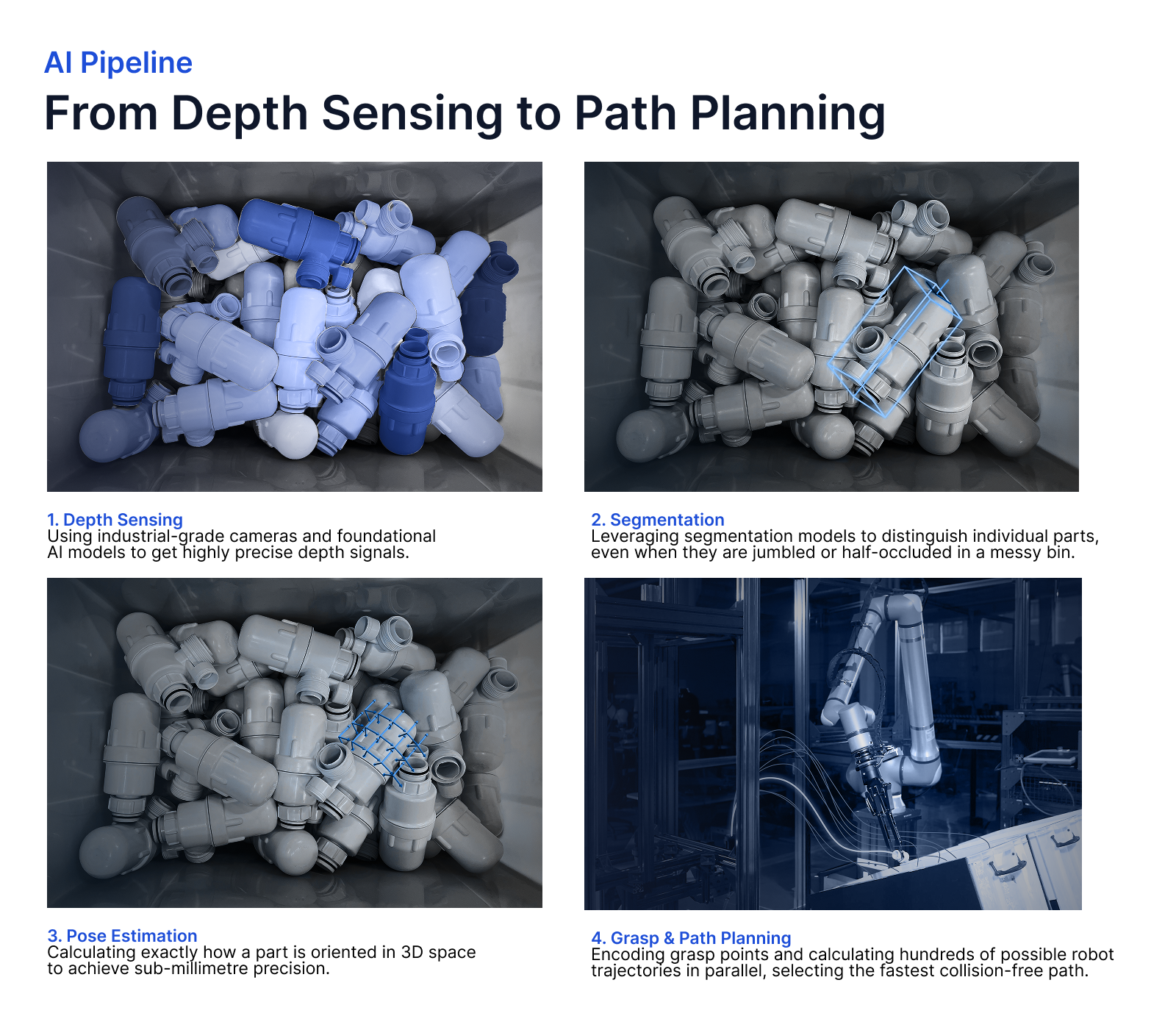
The defining characteristic of an AI Pipeline is its modularity. Instead of a single neural network taking in raw images and directly outputting robot movements, a pipeline breaks the problem down. Sensor data goes into a detection model, which produces an intermediate output like a specific grasp point. That data is then handed off to a separate motion planner to execute the physical move. When a superior AI model is released for one step in the process, the pipeline can upgrade just that component instead of updating the entire system. This compartmentalization also directly improves performance, making it possible to execute tasks at industrial-grade cycle times with sub-millimeter accuracy.
Another reason to choose AI pipelines is compatibility. Most AI pipelines today are deployed on proven, industrial-grade robot arms and hardware. This means factories don’t have to redefine safety standards or site acceptance tests. They get the reliability of traditional hardware powered by the latest AI models.
End-to-End Models: One AI Brain for Robotics
The promise of end-to-end models is simple: generalized intelligence that makes it theoretically possible to switch SKUs without retraining and adapt more efficiently to the environment. Current strategies for an AI brain are mostly based on ‘Vision-Language-Action’ (VLA) models. Input can come from integrated cameras or video data on humans performing certain tasks. Another approach trains the system on human movements captured through a puppeteering mechanism.
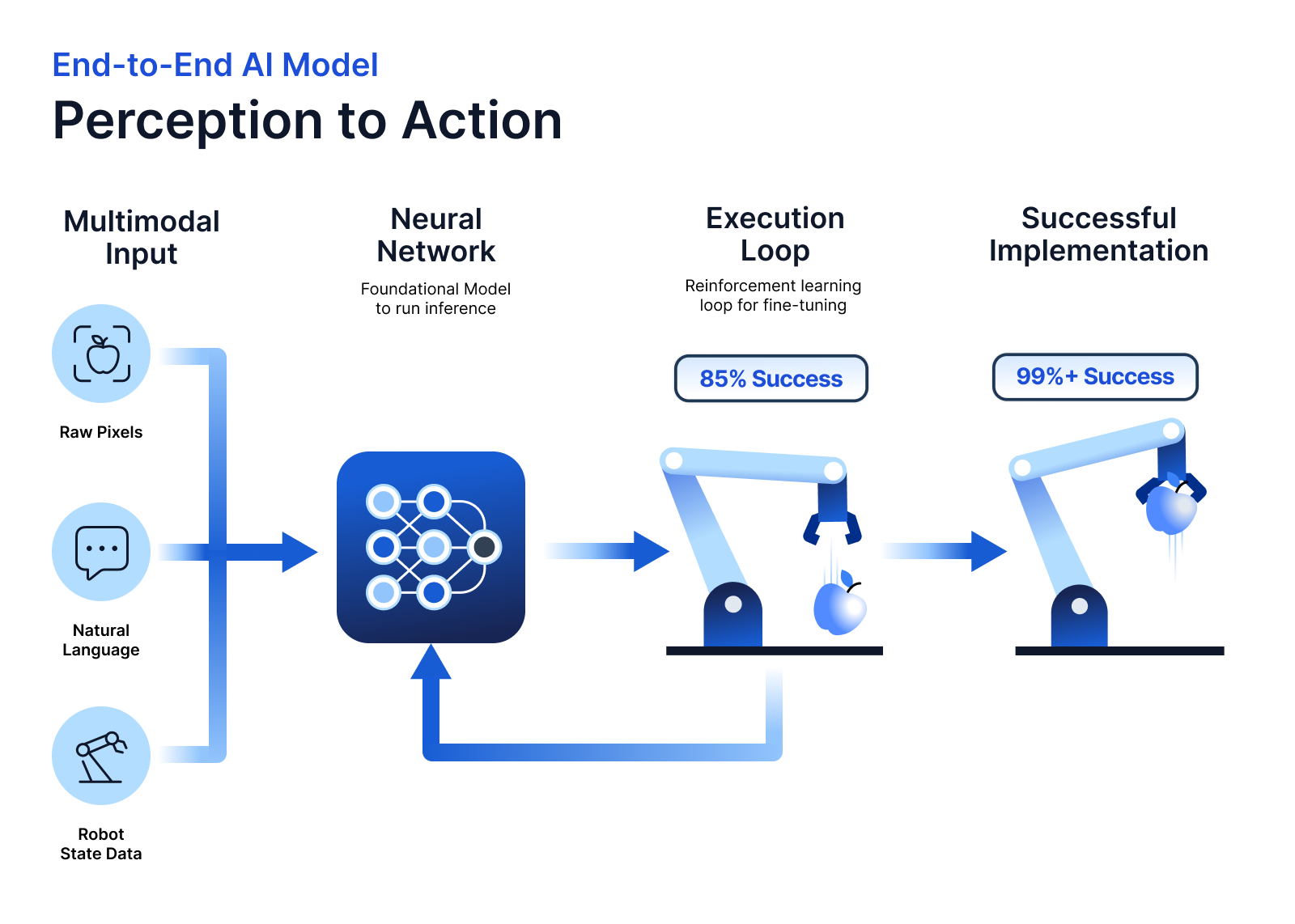
Unlike AI pipelines where learning is compartmentalized, some end-to-end models use reinforcement learning to let the robots self-correct. For example, a robot trained on folding laundry needs to understand not only the required movements but also how different materials behave. It must also solve issues like clothes sticking together or getting jumbled. This requires moving beyond simple imitation to train the robot. Models such as Physical Intelligence’s π∗0.6 use a staged training approach that mirrors how humans learn: starting with instruction from expert demonstrations, progressing to coaching where mistakes are corrected in real time, and finishing with practice through self-improvement based on autonomous experience.
Tradeoff Between Performance and Generalization
The architecture of both models naturally leads to tradeoffs that automation leaders considering Physical AI solutions need to take into account.
For the AI Pipeline, the performance comes from human intervention as the pipeline can be optimized for specific objects, movements or environments. For example, in a random bin picking scenario, grasps can be manually programmed to improve the pick success rates, reduce the computational load, and increase speed. The downside is that rigid logic programmed using a pipeline can break beyond certain thresholds. A product variation the system isn’t trained for or the position of bin changing beyond the set parameters can lead to a picking error. Although it’s important to note that this limitation isn’t unique to the pipelines as end-to-end models also need to be fine-tuned on task-specific data.
Deployment and setting up programming also needs to be factored in for both AI pipelines and end-to-end models. Pipelines usually require manual setup and programming that adds engineering time to new projects, and end-to-end models may require an extended data collection phase.
One of the biggest differentiators for end-to-end models is the higher skill ceiling to higher ceiling for acquiring complex, dexterous skills. Take kitting as an example. A robot pre-trained on erecting a box, inserting a deformable object like a shirt or a cable, and closing the lid needs to make micro-adjustments to account for material differences. Since the robot is trained to handle these materials, it can in theory generalize, and move to other box dimensions. However, in practice it may still need new data collection to train on different box sizes. More importantly, generalization in end-to-end models hasn’t yet reached the maturity level where it can deliver reliable performance across industrial tasks. For example, it’s unclear if a humanoid trained on folding laundry can also be deployed easily to automate mixed case palletizing.
Another factor to consider when benchmarking performance is the safety tax. Most learning-based models are ‘probabilistic’ in nature which can sometimes make them hallucinate. In the physical world, AI hallucinations can often result in unpredictable movement. As a precautionary measure, robots using these models generally have capped off speed, making them currently unsuitable for industrial precision and cycle times.
Navigating the Hype and True AI Maturity
Both AI Pipelines and End-to-End models represent different bets on achieving greater automation adoption. However, the real question executives care about is: which approach is ready to deliver measurable ROI on your factory floor today?
Instead of a binary answer, we’ll present a nuanced picture of the emerging reality in Physical AI in our next post. We’ll move beyond architectural theory to benchmark both approaches against the actual tasks they’re trying to solve. And we’ll explore whether the real breakthrough might come not from choosing between these architectures, but from learning when to use each.
***
Physical AI is evolving every day. Vention’s new whitepaper gives your team the right base to understand the foundation models, maturity, and tactics to deploy Physical AI. Download now to get started.
