Small Gantry Enclosed Timing Belt Actuator
Contents
Overview
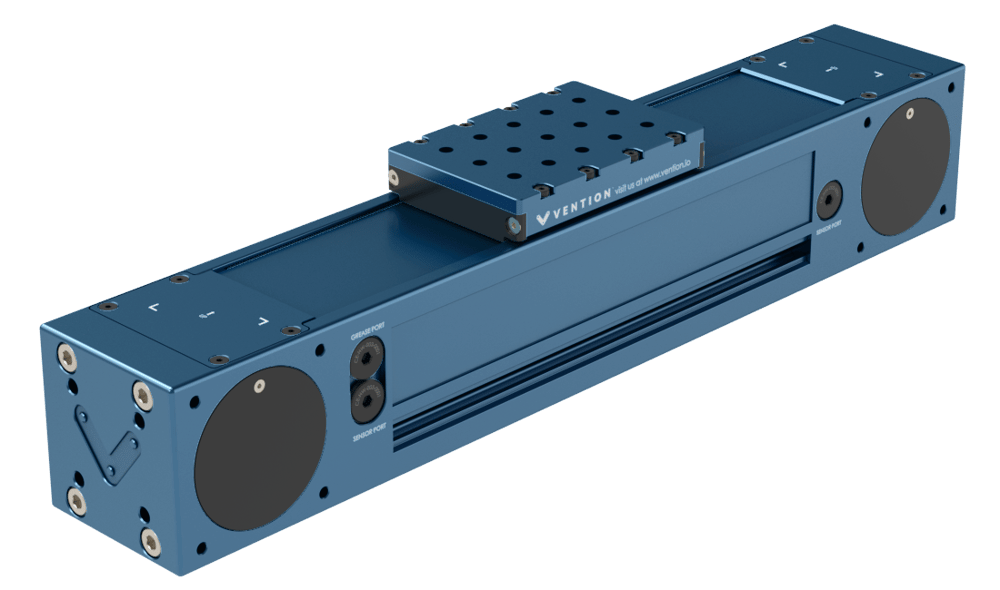
The small gantry enclosed timing belt is a high-performance actuator that opens new possibilities, with a pinch point-free design enabling work in dirty environments. This actuator incorporates a gantry with the same width as the extrusion housing to accommodate a wider range of space constrained applications.
Keep reading the following technical document to understand the detailed specifications of this actuator.
Composition
The enclosed timing belt actuator is composed of the following parts:
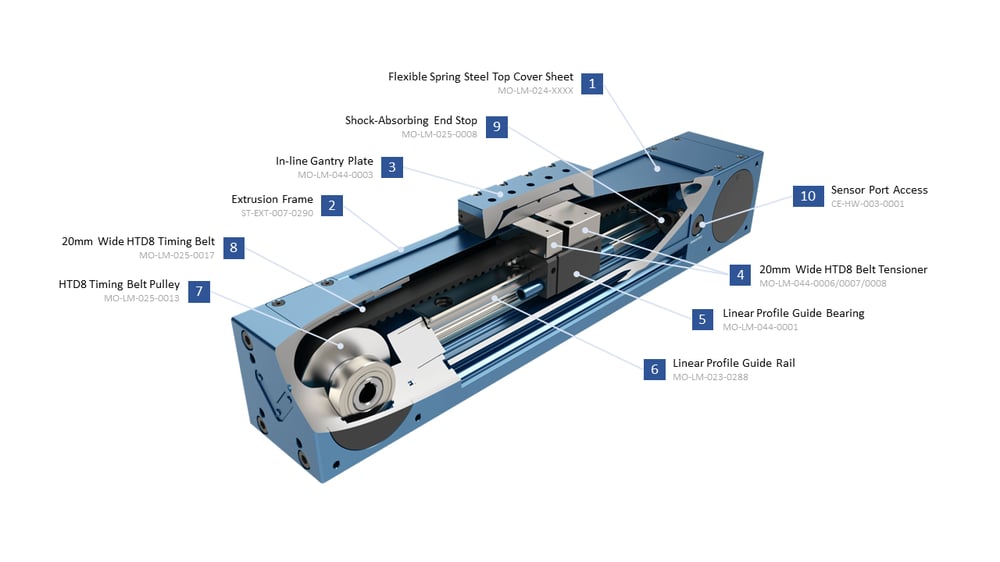
- A thin spring-steel cover seals the top of this enclosed timing belt actuator, keeping contaminants out and eliminating pinch points. Note: Cover is not load-bearing. Do not apply a load to it, or it can break.
- A specially designed extrusion profile provides the outer structure and mounting points, in keeping with Vention’s extrusion ecosystem.
- An in-line gantry plate forms the actuator’s main mobile structure. Use it to attach components, like hardware or another actuator, that you would like to move around.
- A tensioner sets the tension of the 20 mm wide HTD8 belt using an M5 screw locked in place by a set screw.
- A single profile bearing carries loads and moments while ensuring smooth low-friction operation.
- The bearing rolls along the linear profile guide rail, which is made of hardened steel and attached to the extrusion body.
- The timing belt pulleys have full 180 degree belt engagement to ensure belt slip will not occur.
- A 20 mm wide HTD8 belt provides high-output force capacity, allowing the small-gantry timing belt actuator to be used for light or heavy loads while maintaining positional accuracy.
- Internal bump stops ensure that if the actuator impacts the end of travel no components will be damaged.
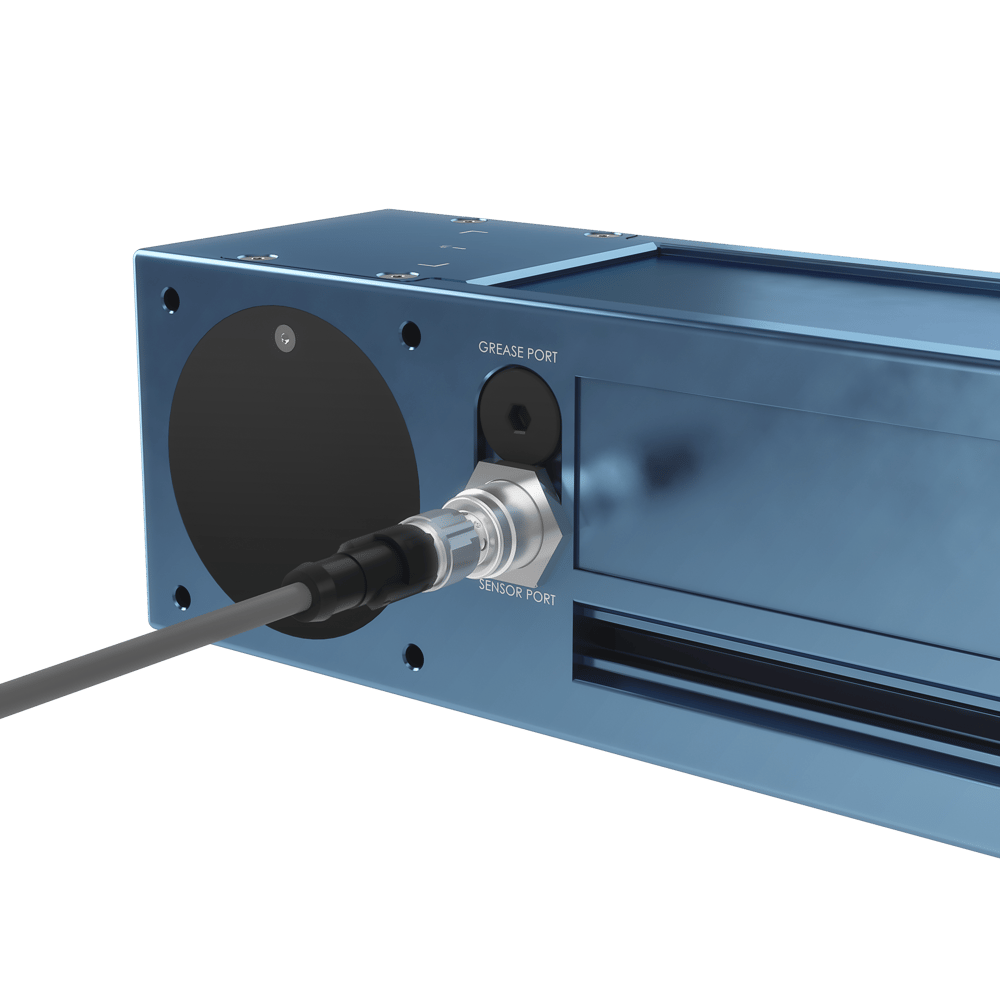
- Easy to access sensor ports for home and end of travel detection.
Applications
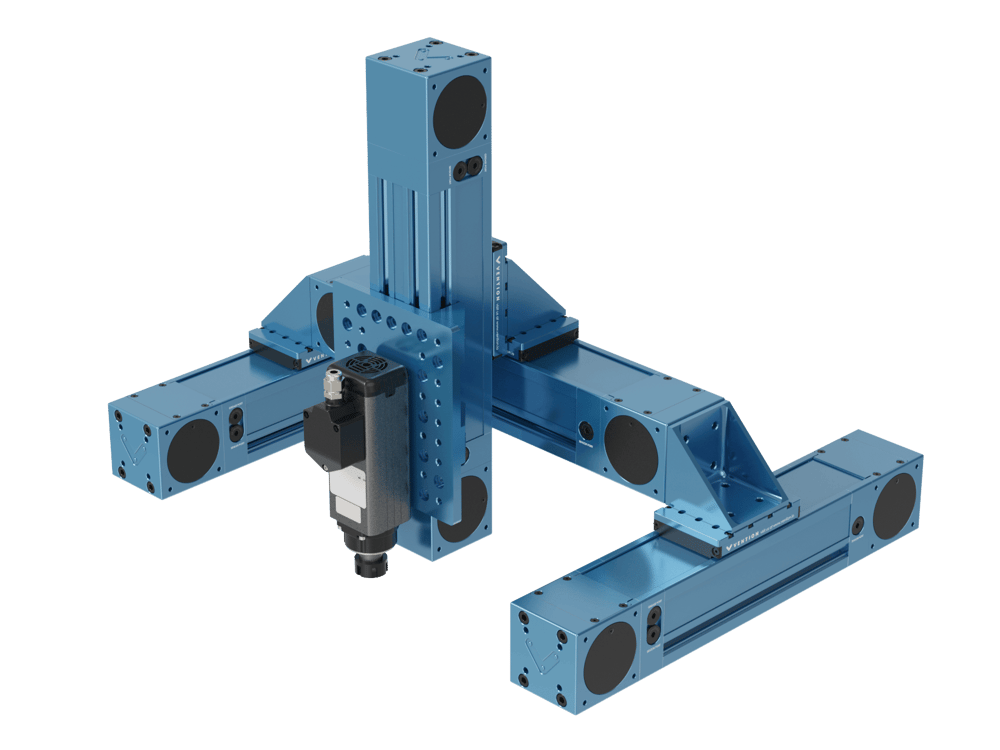
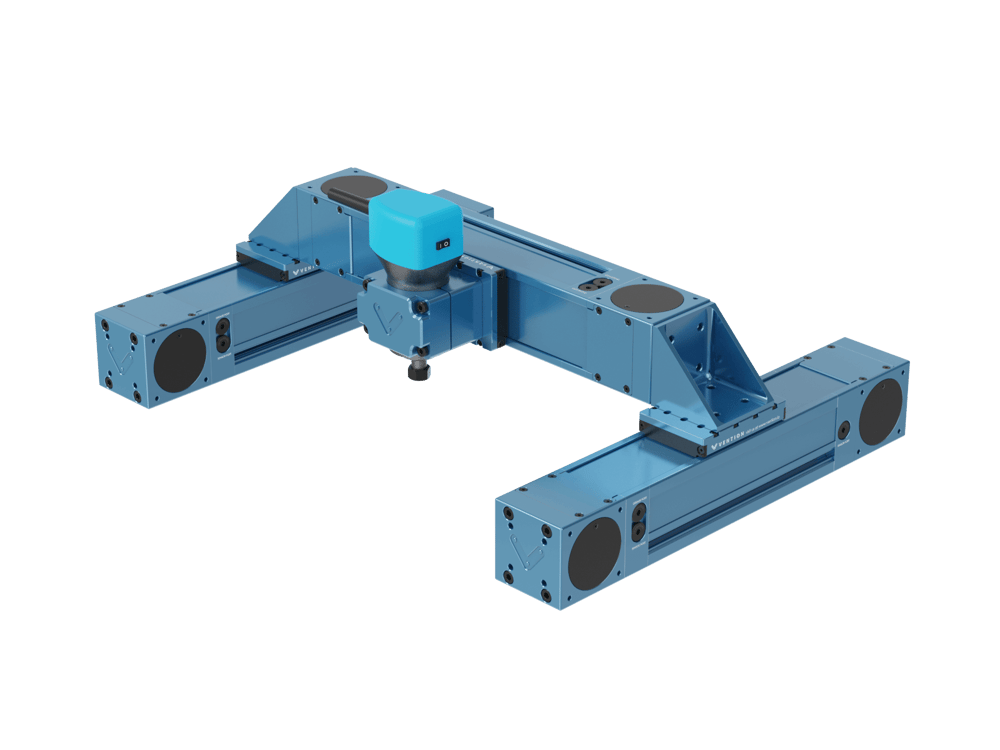
The small-gantry enclosed timing belt is a robust, compact actuator that can be used in horizontal and vertical configurations. Mount in any direction to suit your needs; its flexibility makes it suitable for a multitude of applications.
One great use for the small-gantry enclosed timing belt is for 2 or 3-axis gantry applications. These applications can be used for short-stroke pick and place, small-sized product inspection, engraving, routing, etc.
The benefit of having a gantry with the same width as the extrusion is the ability to mount these actuators very close together to minimize the space used for a given application.
Explore public designs to get ideas on how you could use the enclosed timing belt actuator.
Technical Specifications
The table below lists the overall performance specs for the enclosed timing belt actuator. For details see sections Load Capacity, and Driving Force.
| Displacement Ratio (mm/motor shaft rotation) | 208 |
| Force per unit of input torque (N / Nm) | 30.2 |
| Maximum input torque (Nm) | 61 |
| Repeatability including backlash (mm) | ±0.3 |
| Total Backlash (mm) | 0.25 |
| Backdrive Resistance | Low |
| Max Lifting Capacity | See Driving Force |
| Motor Compatibility | NEMA 34, 14mm shaft with 5mm key |
| Sensor Compatibility | CE-SN-004-0003 Flush Inductive Proximity Sensor |
Load Capacity
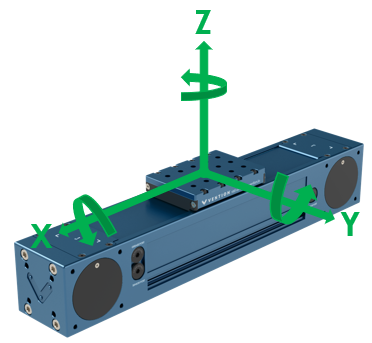
The table below shows the load capacity of the three configurations of the small-gantry enclosed timing belt. Both nominal and max peak forces are specified in each direction. Use the diagram below to understand the directional load and moment capacities.
| Nominal Axial Force (Fx) | See Driving Force | ||
| Max Peak Axial Force (Fx) | 1240 N | ||
| Nominal Roll Moment (Mx) | 100 Nm | ||
| Max Peak Roll Moment (Mx)* | 255 Nm | ||
| Nominal Horizontal Force (Fy) | 1200 N | ||
| Max Peak Horizontal Force (Fy)* | 1800 N | ||
| Nominal Pitch Moment (My) | 43.5 Nm | ||
| Max Peak Pitch Moment (My)* | 115 Nm | ||
| Nominal Vertical Force (Fz) | 1200 N | ||
| Max Peak Vertical Force (Fz)* | 1800 N | ||
| Nominal Yaw Moment (Mz) | 62 Nm | ||
| Max Peak Yaw Moment (Mz)* | 115 Nm |
The nominal values are valid for an actuator in motion with a rated lifespan of 2,000,000 cycles.
*Note that max peak values represent the absolute maximum load. Peak loads are acceptable during one-time events such as emergency stops, but operating at peak loads continuously will cause excessive wear and significantly decrease the actuator’s lifespan.
Driving Force
Output force indicates how much weight the actuator can move and how quickly it can accelerate that load. This force is shown as “Fx” in the Load Capacity figure. For a more in-depth explanation of driving force, see the section of our linear actuator selection guide that covers calculating actuator forces, or ask your application engineer for an explanation and help with calculations.
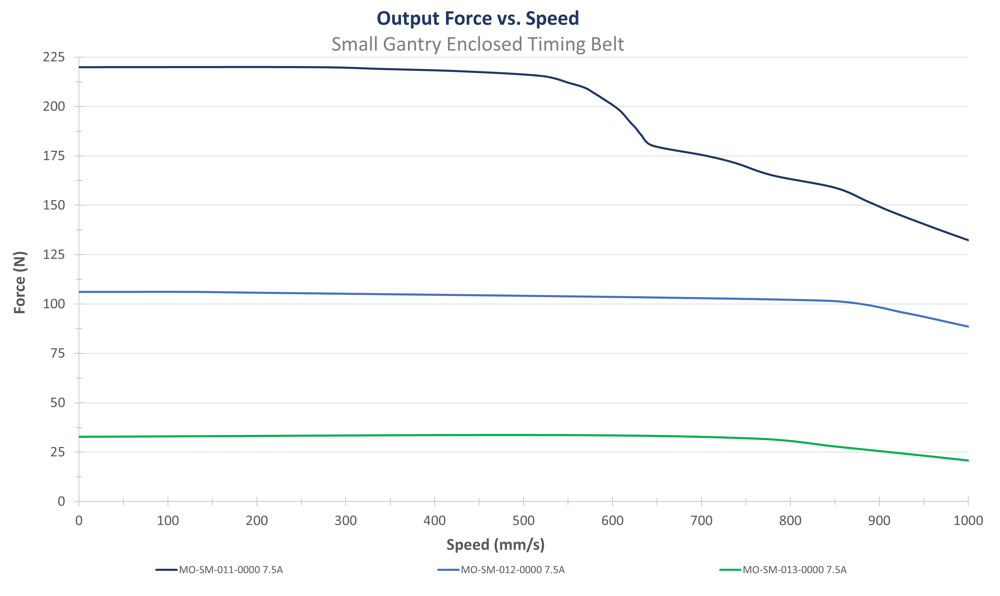
These performance curves are made with our motors and controller at steady state conditions. Using others motors or controllers will have different behavior therefore performance and reliability cannot be guaranteed.
The above graph shows the driving force of the enclosed axis and the range of achievable operational speeds (the linear range is the limiting factor). The three different curves represent the actuator’s performance with the three types of NEMA 34 motors offered by Vention: MO-SM-011-0000, MO-SM-012-0000, and MO-SM-013-0000, driven by MachineMotion 2.
Note: During MachineMotion’s boot up sequence, the holding force is momentarily 65% of its rated value. Please keep in mind when using in vertical and/or angled applications.
Assembly Instructions
Sensor Installation
The enclosed axis comes completely assembled. All you need to do is install your choice of powertrain components, such as brakes, gearbox, motor, and sensors.
Sensors can be installed in any of the four sensor port locations. To install a sensor, remove the port plug and screw the sensor all the way into the hole until it bottoms out. Install one jam nut and tighten it to lock the sensor in place.
Powertrain Installation
To connect powertrain components (stepper motor, brake and gearbox), perform the following steps:
- Remove the motor cover on the actuator endblock, to install the stepper motor.
- Optional: If you have a brake or gearbox, connect them to the output shaft of the stepper motor using the provided M6 X 20mm fasteners.
- Connect your stepper motor to the actuator using x4 M6 X 20mm fasteners (HW-FN-005-0020).
Notes:
- When installing motors, apply a small amount of grease to the motor shaft so that it is lightly coated. This will reduce the possibility of fretting corrosion occurring during operation, making future removal easier.
- Moreover, do not use excessive force (hammering, prying or using screws to “push” the motor) to install the motor.
Mounting Features
Once the powertrain and sensors are in place, attach the actuator to your structure by connecting any appropriate structural component to the actuator’s gantry plate or end blocks.

When mounting multiple enclosed actuators in parallel, please refer to the self aligning mount technical document found here.
Maintenance
For maintenance instructions please refer to the appropriate section in our Maintenance Technical Document.