Empowering Robotics Research and Next Gen Solutions with CMU
Learn how Carnegie Mellon University uses Vention across their campus for cutting-edge robotics research

Geschichte Highlights
Edu-friendly solutions with UR cobots and educational discounts
Modular mounting plates, robot bases, and fixtures for any project
Mobile robot bases for easier testing and modifications
End-to-end design and support services from Vention

Das Problem
Carnegie Mellon University is at the forefront of cutting-edge robotics research, led by their Computational Engineering & Robotics Laboratory (CERLAB) and Manufacturing Futures Institute (MFI) in Mill19. When faced with the challenge of developing systems for construction robotics, CERLAB needed flexible, modular solutions to test and refine new concepts. Their specific needs included vision-based mobile manipulators for construction and teleoperated inspection systems for remote, real-time services. The lab sought a partner that could provide user-friendly and adaptable automation solutions that would meet both projects’ requirements and goals.

"At CERLAB, we focus a lot on shifting academic research into solving industrial problems. And having a partner like Vention who provides us with the tools required to do that is a great one for us."
Das Projekt
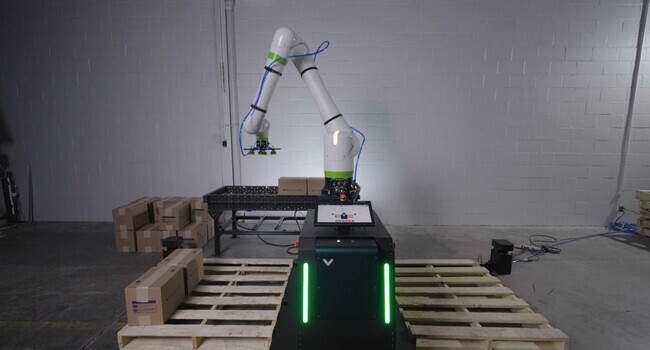
CMU’s CERLAB deployed Vention’s modular components across two groundbreaking initiatives. The Mobile Manipulator project, developed in partnership with Shimizu Corporation, used a Universal Robots cobot and mounted on a Vention mobile pedestal to inspect 3D printed complex concrete structures.
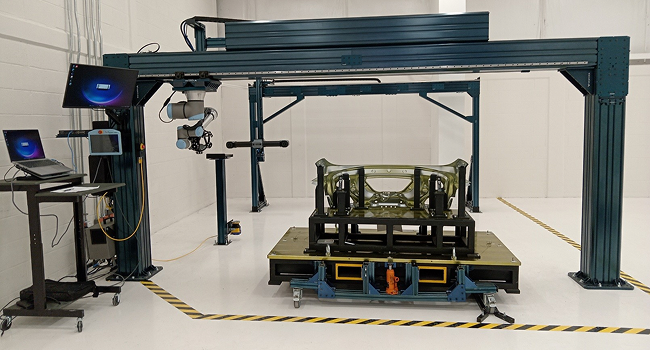
In the Metrology project, a second team enabled remote robotic inspection from anywhere in the world via VR headsets. Both teams benefited from the plug-and-play nature of Vention’s ecosystem, allowing fast setup and easy mobility. These research initiatives reflect a broader adoption of Vention at CMU, including several robotics projects underway at Mill 19.








Die Ergebnisse
Both CERLAB projects achieved remarkable results in a short timeframe. The Mobile Manipulator project was set up quickly, with the modular system allowing CERLAB to test various configurations in a dynamic, real-world environment. The flexibility of Vention’s mobile base enabled the team to easily move and reposition the system within the lab for optimal testing. The Metrology project also saw significant advancements in remote inspection technology, with robots effectively enabling VR-based, real-time inspections, significantly improving efficiency and safety.
Both projects demonstrated the value of easy-to-integrate, scalable automation solutions.Today, the partnership continues to grow, with Vention hardware now powering innovation not only in CERLAB but also across Carnegie Mellon’s Manufacturing Futures Institute. Not only are these projects underpinning research and future industry advancements, but they’re also educating and developing the next generation of the workforce and professional leaders.
Projekt Spezifikationen
Explore Vention's solutions for Research & Education
Learn more
Ähnliche Geschichten
Modernizing Confectionery Production with Agile Automation
A global leader in the consumer packaged goods (CPG) industry is driving a massive modernization effort across its manufacturing footprint. By establishing a dedicated automation task force, the company is moving away from labor-intensive manual processes toward a high-mix, high-reliability production environment.

Scaling Craftsmanship: How The Horizon Group, Inc. Automated Their Sanding Tasks
The Horizon Group, Inc. sought a way to remove repetitive, monotonous sanding tasks from its skilled craftsmen to increase production capacity without adding headcount. By leveraging Vention’s MachineBuilder software and UR10 Cobots, they developed a custom-tailored system that fits their specific shop constraints and budget. The project resulted in a 100% reallocation of skilled labor toward complex fabrication, a 20% increase in project efficiency, and significantly improved consumable longevity compared to traditional manual equipment.
Bright IA Achieves Cycle Times Under 10 Seconds with Custom Tending
Discover how Bright IA engineered a flexible multi-machine tending work cell using a FANUC CRX-10iA cobot and Vention’s modular platform to manage five different adhesive cartridge formats.
3D Infotech Achieves 70% Reduction in Inspection Time and 300% Capacity Increase
Discover how 3D Infotech’s Universal Metrology Automation (UMA) Cell, built on the Vention platform, delivers higher accuracy, repeatability, and cycle times.